


View 视点变换矩阵的推导
View 矩阵用于将物体从世界空间(World Space)转换到摄像机空间(Eye
Space),下面我们将进行公式的推导,首先通过函数指定我们的需要的三个
向量
CONST D3DXVECTOR3 *pEye,
CONST D3DXVECTOR3 *pAt,
CONST D3DXVECTOR3 *pUp
我们指定视觉空间的三个基向量为 xaxis,yaxis,zaxis 。那么 zaxis 是我们
视线的方向,所以 zaxis = normal(Eye - At),我们知道朝上为 Up,并且向量
Up 属于 yz 平面(通过平移,向量与位置无关),所以可以求得 xaxis,通过求叉
积。那么 xaxis = normal(cross(Up, zaxis)),这下我们再求出 yaxis =
cross(zaxis, xaxis)
注意:up 方向相当于你的头顶,你把头仰望着,但是你的上方仍然是你的正上
方,但是你的头顶指向的方向就相当于摄像机空间的 yaxis。
xaxis = (xaxis.x,xaxis.y,xaxis.z,1); //用齐次坐标表示
yaxis = (yaxis.x,yaxis.y,yaxis.z,1);
zaxis = (zaxis.x,zaxis.y,zaxis.z,1);
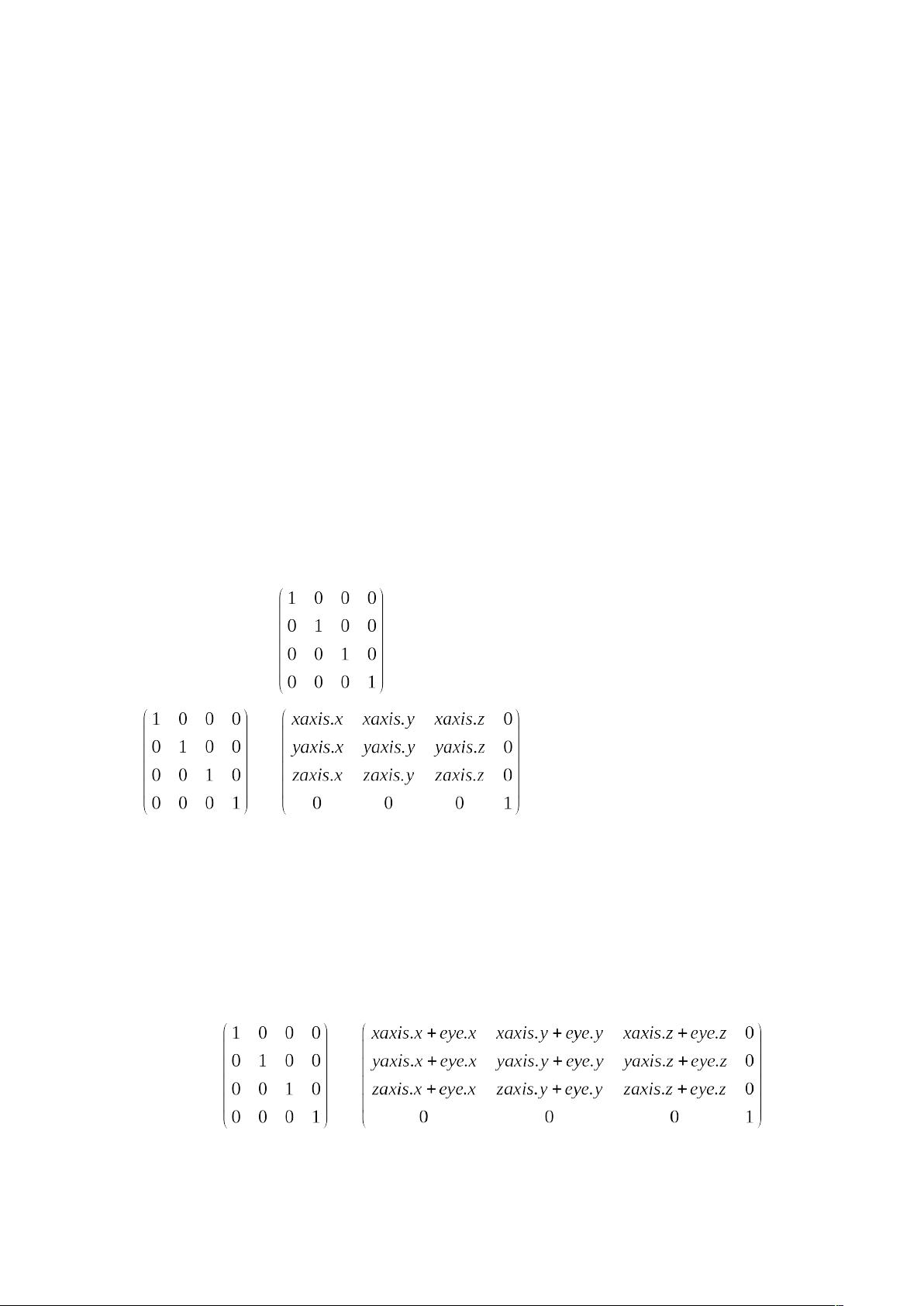
世界空间的基坐标为 x = (1,0,0,0), y = (0,1,0,0), z = (0,0,1,0);
写成矩阵表示为 ,那么必定有一个矩阵使得 M *
= (当他们在同一个原点时)
因为我们知道 eye 摄像机的位置了,所以
u = (xaxis.x + eye.x, xaxis.y + eye.y, xaxis.z + eye.z);
v = (yaxis.x + eye.x, yaxis.y + eye.y, yaxis.z + eye.z);
n = (zaxis.x + eye.x, zaxis.y + eye.y, zaxis.z + eye.z);
相当于 eye + xaixs, eye + yaxis, eye + zaxis 一个点加一个向量(方向)。
那么 M * =
。














