




Dynamic Model for a Miniature Aerobatic Helicopter
V. Gavrilets
∗
B. Mettler
†
E. Feron
‡
Abstract
This paper describes the development of an analytic, low-order dynamic mo del of a miniature aerobatic
helicopter. This mode l was developed for the design and simulation of control systems capable of aerobatic
maneuvers. The goal was to obtain a model with the least amount of complexity, yet accurate across the
flight conditions encountered during extreme flight. This objective was achieved by focusing on the particular
characteristics of such highly maneuverable miniature helicopters. We followed a component buildup approach
in devising the model, using simplified analytical expressions for the component forces and moments. In addition
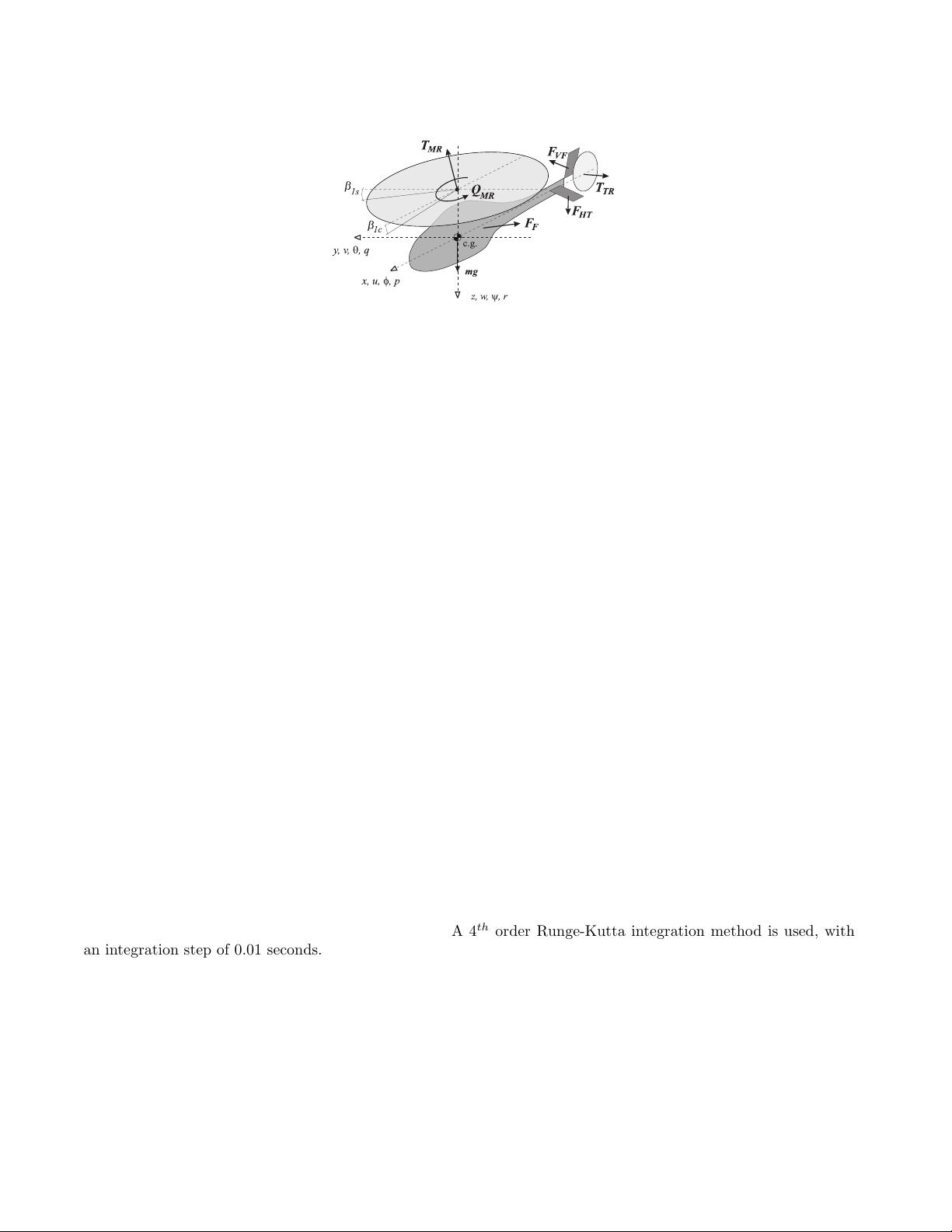
to the rigid-body dynamics, the model includes states for the longitudinal and lateral main rotor flapping, the
rotor speed, and an integral of the rotorspeed tracking error; resulting in a total of only 17 states. Flight
test experiments were used to estimate several key parameters, such as the equivalent stiffness in the hub and
equivalent fuselage frontal drag area.
1 Introduction
Miniature helicopters are naturally more agile than their full-scale counterparts [15]. This trait results from physical
scaling effects and specific design features found in helicopters of that size. Following physical scaling rules, as
the vehicle size decreases, the moments of inertia decrease with the fifth power of the scale factor, while the rotor
thrust nominally decreases proportionally to the vehicle mass, i.e., with the third power. Miniature helicopters can
easily have a high thrust-to-weight ratio (it can easily reach values as high as 2 to 3), which tends to accentuate
the scaling effects. Moreover, the rotor heads of miniature rotorcraft are also relatively m ore rigid than those in
full-scale helicopters, allowing for large rotor control moments. Also, many such vehicles can pro duce negative
thrust, allowing sustained inverted flight. Combined, these effects and design features allow for large and fast
angular excursions (up to 200 deg/sec), and large bi-directional load factors, which are the main ingredients of
aerobatic flight. When flown by expert pilots, miniature helicopters can execute maneuvers that outperform the
most agile full-scale vehicles. In addition, without human aboard, a broader variety of maneuvers may also be
possible. Such miniature, highly agile air vehicles are uniquely suited to fly through confined spaces. For example,
they could be used to explore urban canyons or other challenging environments, or to record aerial footages for
movie making industry. Mettler et al. produced a detailed analysis of these characteristics [16].
The main motivation for our work in autonomous aerobatic helicopter flight, and for the modeling work presented
herein, was the challenge of executing expert-pilot maneuvers entirely under computer control. Being able to
automatically execute aggressive maneuvers enables using the broadest range of behaviors when performing tasks
such as the ones described above. Pre-programmed maneuvers can be incorporated into online motion planning
techniques such as the “maneuver automaton” [6]. In a fully autonomous setting, such capabilities are key to a
timely and effe ctive reaction to unforeseen obstacles.
There exists an extensive body of literature on the dynamics of full-scale helicopters. Step-by-step procedures for
developing first-principles dynamic models have been devised and published [22, 2, 25]. The models used in full-
scale helicopter simulators are high-order and contain a large number of parameters that often cannot be measured
directly. Moreover, once developed, models require extensive validation and refinement until they can predict the
vehicle dynamic behavior accurately. Applying detailed first-principle modeling techniques, is thus not a trivial
task, and may not be warranted given the differences between full-scale and miniature helicopters. Helicopters
∗
Ph.D. candidate, gavrick@mit.edu. Corresponding author.
†
Post-doctoral associate, bmettler@mit.edu
‡
Associate Professor, Department of Aeronautics and Astronautics, MIT, Cambridge, MA 02139, feron@mit.edu.
1















- 1
- 2
- 3
- 4
- 5
前往页