小车系统的组成主要包括避障传感器部分,电机控制部分,速度反馈部分以及 ARM
嵌入式系统核心控制部分。避障传感器系统采用红外线技术,主要完成对障碍物的感应;
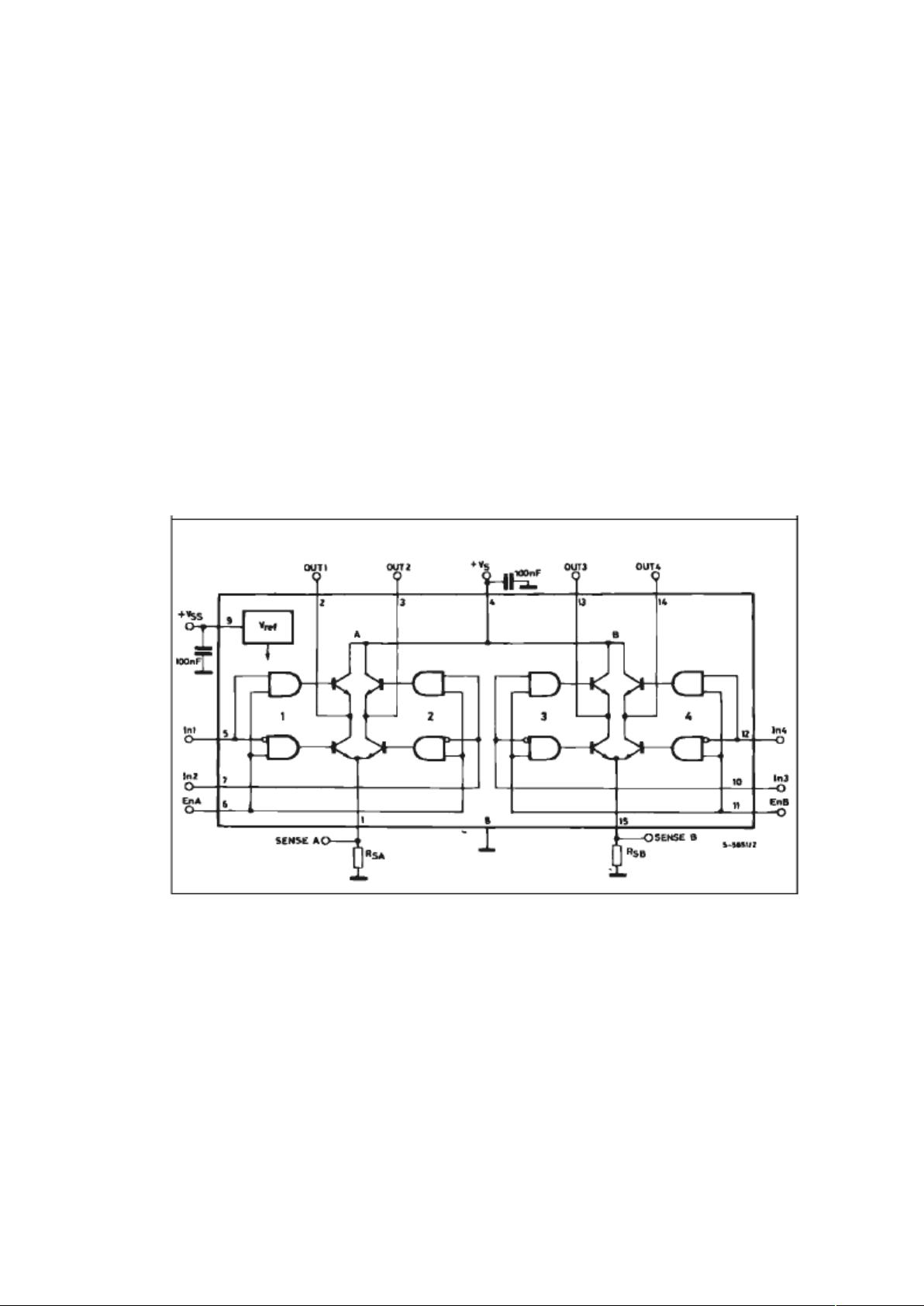
移动机器人小车的电机控制转速部分采用步进电机作为电机首选;还有速度反馈的部分,
由于 ARM 板内部没有记数的功能,我们就设计了传感器数据读取的一个系统。最后,贯
穿整篇文章的是对机器人的核心部分(基于 ARM 嵌入式系统)的研究和设计,主要让操
作系统完成控制功能(主要是通过接收避障系统感应外界环境所返回的信号,进而控制运
动控制系统,从而完成一个自主运动的智能功能)。
关键词:ARM 板;自主行走;红外线感应;嵌入式操作系统;电机
1 . 机器人实现方法和实现过程
以 S3C44B0X 实验板为平台,以及避障系统和运动控制系统两部分结合起来构成整个
移动机器人最主要的硬件部分。其中,实验板为移动机器人的中枢神经部分,它承担着对
于外部硬件的全权管理(包括接收外部硬件的传递过来的信息,对信息进行相应的处理,
以及把处理后的信息再传递给外部硬件);避障系统为整个机器人系统的感应部分,一切
外界环境的识别都有避障系统来完成;运动控制系统为整个机器人系统的移动部分,它承
担着让机器人能自由的在物理环境中移动的功能。
1.1 实现过程
以 S3C44B0 开发板构建整个机器人的中枢神经,主要是采用嵌入式操作系统来管理。
这里具体工作主要包括将 uClinux 操作系统移植入 ARM,以及在操作系统下编写外部驱动
程序来识别和控制外围硬件(主要是避障系统和运动控制系统)。
避障系统设计:采用红外线来实现避障(电路设计,调试)。
运动控制系统设计:采用直流电机来实现机器人的移动功能(电路设计,调试)。
软件设计部分:主要是应用程序配合外部硬件驱动程序。下文将详细介绍软件实现的
具体方法和实现代码。
2 . 自主行走机器人的行走控制方案
2.1 直流电机的控制方案
一个电动小车整体的运行性能,首先取决于它的电池系统和电机驱动系统。电动小车
的驱动系统一般由控制器、功率变换器及电动机三个主要部分组成。电动小车的驱动不但
要求电机驱动系统 具有高转矩重量比、宽调速范围、高可靠性,而且电机的转矩 -转速特
性受电源功率的影响,这就要求驱动具有尽可能宽 的高效率区。我们所使用的电机一般为
直流电机,主要用到永磁直流电机、伺服电机及步进电机三种。直流电机的控制很简单,性