基于STC单片机的智能语音控制小车.doc
需积分: 9 122 浏览量
2022-10-19
23:24:56
上传
评论 1
收藏 4.93MB DOC 举报

基于 STC 单片机的智能语音控制小车
学习资料 整理分享
基于 STC 单片机的智能语音控制小车
一、实验目的
1。随着科技的进步和社会的发展,汽车技术的发展越来越智能化。本次接口实验设计就是基于
简单智能化的基础上,采用 LD3320 语音单元和 STC 单片机和 L298N 电机驱动,开发出基于语音
无线控制与智能避障的小车,实现非特定人声语音控制小车,以及小车超声波自动避障行驶的
功能,同时液晶显示出超声波前方障碍物的距离.
2.掌握用 Altium Designer10 软件绘制原理图和 PCB 电路,以及电路板的制作过程(包括转印、
腐蚀,焊接,下载与调试),熟练 Keil uVision4 环境以及单片机 C 代码的编写、调试和 hex 文
件的生成并下载到单片机芯片内,掌握软硬联调技巧与方法。
3.掌握 基于 LD3320 的语音单元的编程、语音处理及与单片机间的通信.
二、系统总体方案
本次设计的小车采用 STC89C52 单片机作为主控芯片,通过 LD3320 语音单元接单片机控制
小车行驶状态(包括前进、后退、左转、右转及停车);小车行驶过程中遇到障碍物,如果没有
接收到语音信号而超声波检测模块检测周围障碍物小于安全距离 40cm,小车自动转向,距离通
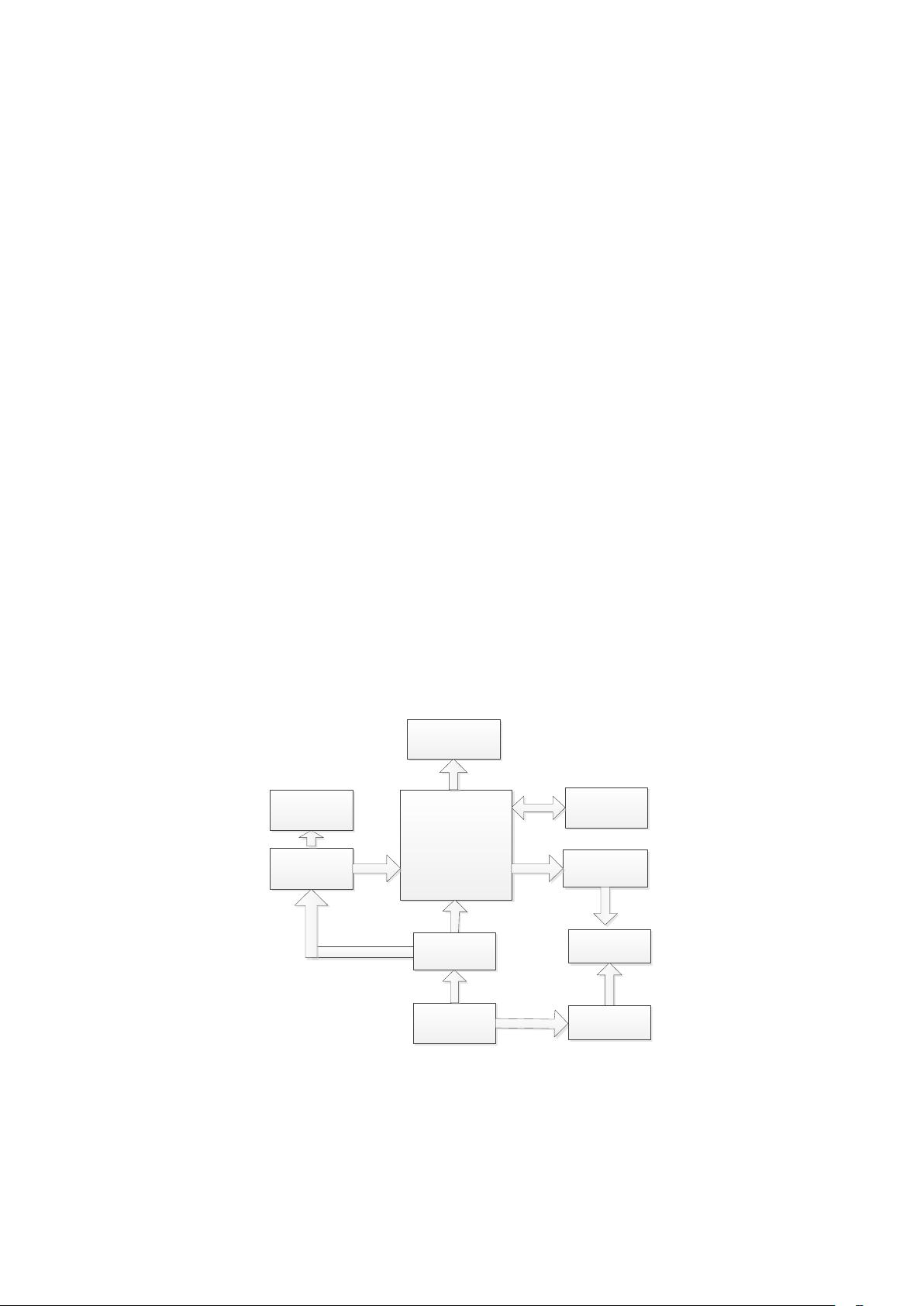
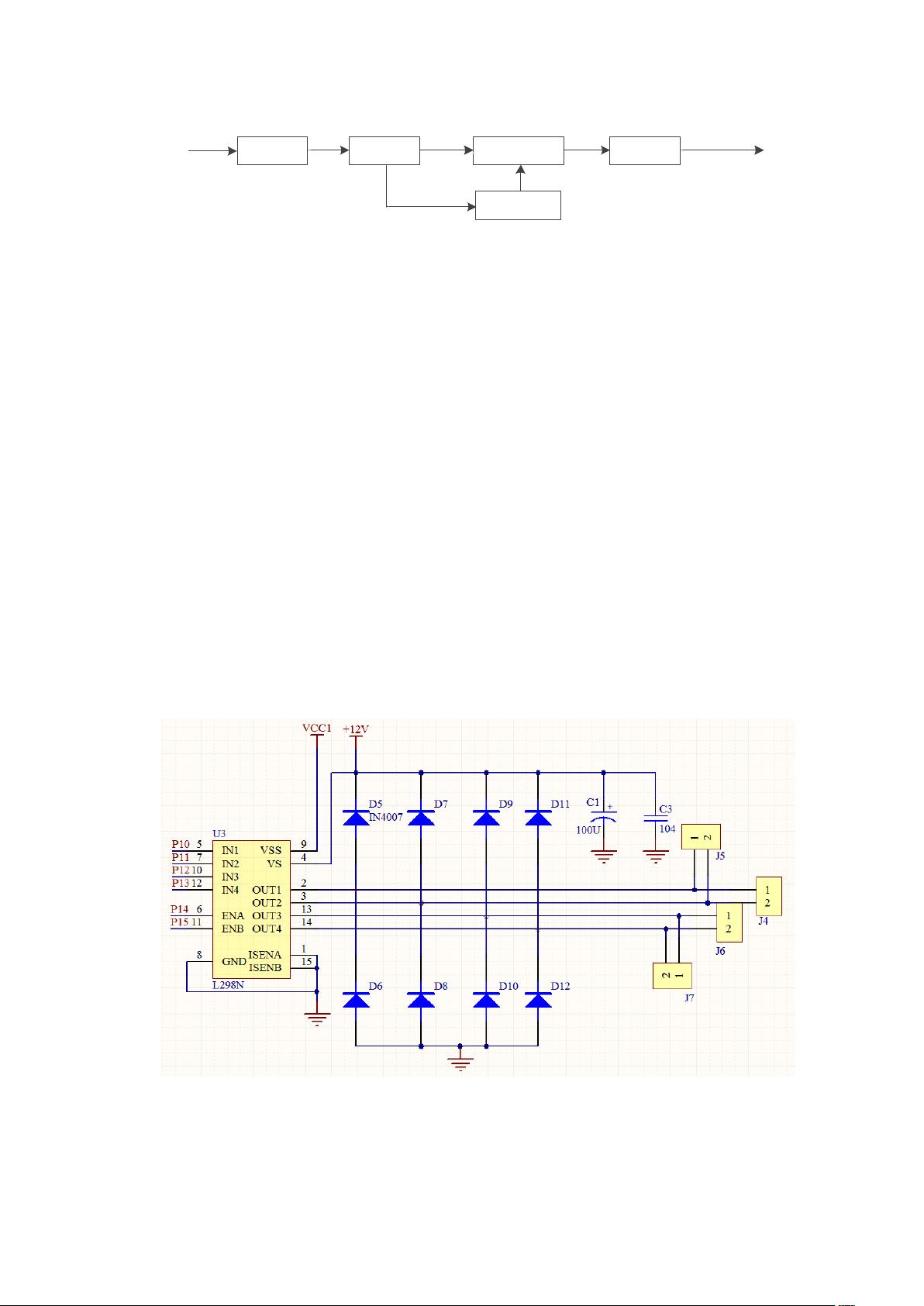
过 LCD1602 液晶显示出来;采用 L298 作为电机驱动芯片驱动小车行驶.系统总体框图如图 2。1:
HC-SR04
超声波模块
LD3320
语音单元
STC89C52
单片机
LCD1602
液晶显示
18650
锂电池电源
L298N
电机驱动
直流减
速电机
降压模块
扬声器
7805
稳压电路
图 2.1 系统总体框图
三、硬件设计
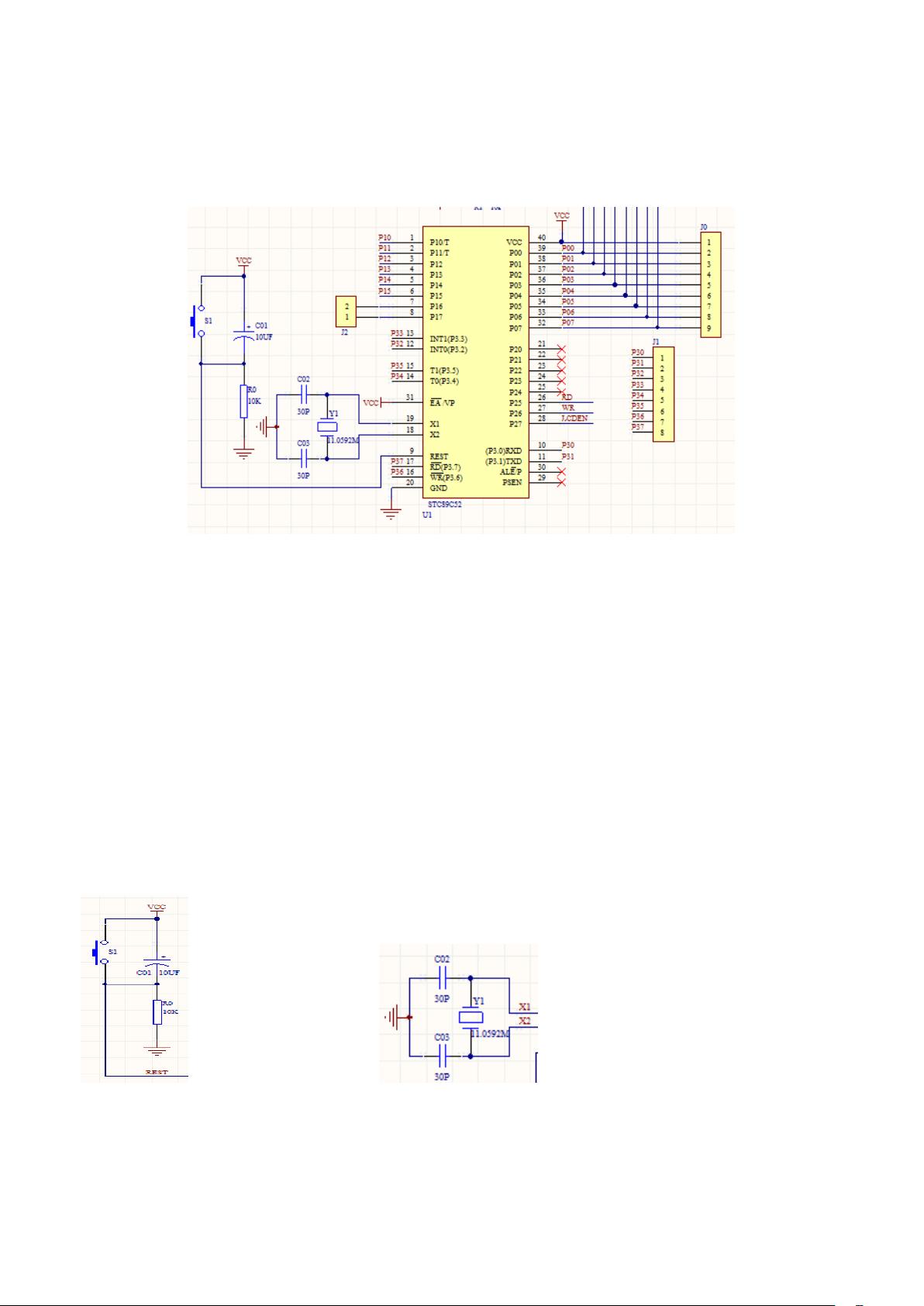
3。1 主控系统
剩余26页未读,继续阅读
资源评论













