摄像机标定(2008年数学建模竞赛)
需积分: 9 9 浏览量
2010-04-18
09:43:03
上传
评论 4
收藏 580KB DOC 举报


数码相机标定
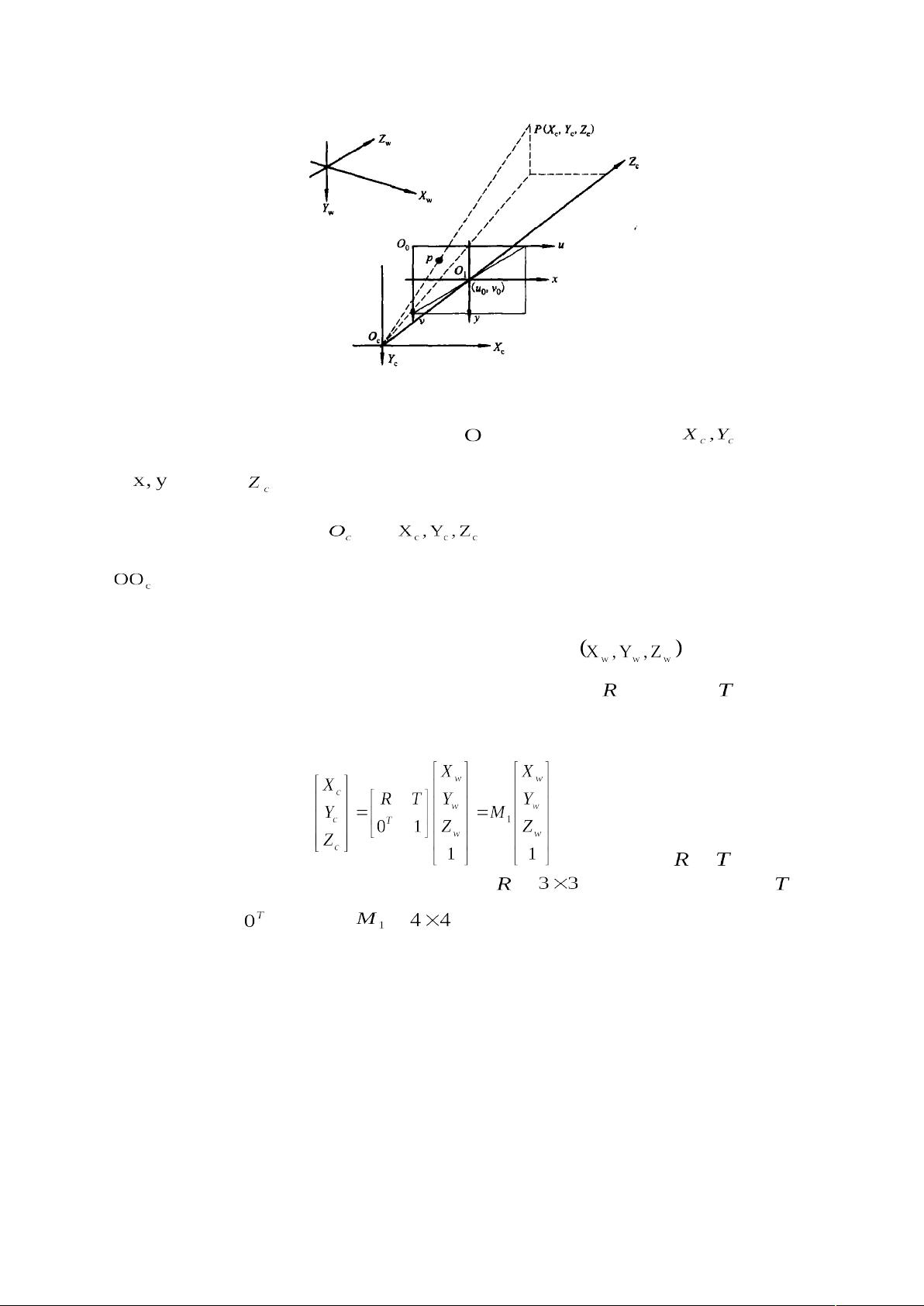
摘要:针对相机标定问题,在做出合理的假设前提下,首先根据相机成像原理,建立
了相机的针孔模型,得出了物体的世界坐标与相机的像素坐标之间的转换矩阵 。这
种模型实现简单,但通过已知点的检验,发现这种模型的精度不高。针对针孔线性模
型缺点,本文引入了非线性因素(如相机的畸变等),建立了基于 Tsai 算法的非线性
模型。这种模型需要先用线性模型求出一个较准确的参数,然后根据这些参数利用非
线性模型进一步提高精度。针对模型求解过程中涉及到靶标以及靶标像之间的对应关
系,确定靶标的像坐标是精确求解模型的关键。针对圆心坐标本文提出了一种求解像
坐标圆心的直径交叉法,并用霍夫变换求出圆心相比较,两种算法的相差很小,这种
算法理论简单,不需要复杂的数学运算,但精度和霍夫变换相差不多。在问题 (3)模型
检验中由于图像畸变一般在边缘较大,为了更好体现模型检验的可信性,本文选取图
像边缘上的点做检验,计算出模型的最大误差。结果表明非线性模型的精度相对于线
性模型精度有很大程度的提高。在问题(4)中,基于以上建立的单相机标定模型的参数,
综合考虑两相机标定模型。根据建立的模型中的几何关系,能够得出一般情况下两相
机之间的距离和它们的相对角度。当两相机的光学系统光轴之间的夹角近似取零时,
即得到特殊的平行视点双相机几何模型,这个模型简单,也适合实际情况。
关键词: 系统标定 霍夫变换 Tsai 算法 双目定位
1

剩余19页未读,继续阅读
资源评论













