
Wall-following algorithm for reactive autonomous
mobile robot with laser scanner sensor
Ana Rafael
Porto, Portugal
up201405377@fe.up.pt
C
´
assio Santos
Porto, Portugal
up201802025@fe.up.pt
Abstract—Mobile robots with wall-following capacity can be
used in a number of applications, such as intelligent inspection,
security patrol and venue service. In this paper, we present the
implementation of a wall-following algorithm for an autonomous
mobile 2 wheeled robot with a laser scanner. The perception of
the environment is achieved with a scan laser, attached to the top-
front part of the robot. The proposed wall-following algorithm
makes a robot wander at random until a wall is found, then
follows the wall - through an implemented proportional control
to keep a constant distance from it - in the outside and inside of
a V” and ”W” shaped wall, respectively. The system consists of
a reactive robot since it responds to an unknown environment
without the need for wall modelling. Experiments were conducted
in terms of wall finding and following in various environments
for the production of correct and robust robot behaviour.
Index Terms—Autonomous navigation, Mobile robots, Reactive
robot, Wall-following
I. INTRODUCTION
Autonomous mobile robots have a wide range of applica-
tions, namely as sweeping robots, inspection robots, service
robots among other possibilities. Wall-following behaviour
is among one of the most used navigation methods in au-
tonomous robots. It consists in the ability to move along con-
tours of walls and edges wile maintaining a safe and constant
distance from it [1]. Most frequently this practice is achieved
with distance sensors, such as ultrasonic or laser sensors.
Such algorithms can be used as part of indoor environment’s
circulation control, maze solving and environment exploration
[2]. Some problems in wall-following control are related with
noisy data from the sensor, thus in the designed algorithm a
mean of the wall distance measurements was considered. For
the past few decades several algorithms have been proposed
for wall-following. One of the most common category of these
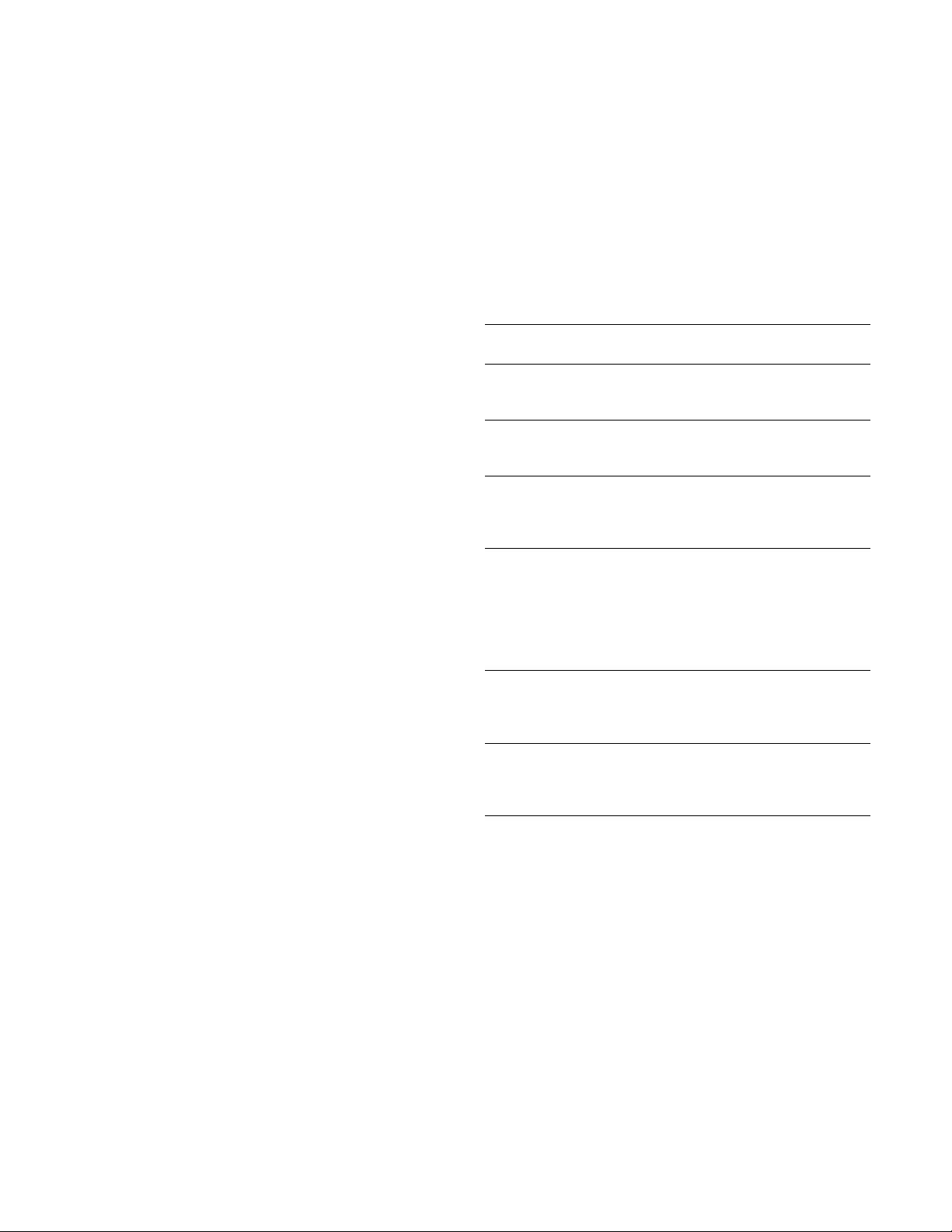
algorithms is related with reactive robot. Table I comprises a
summary of the most relevant published papers in the field of
wall-following algorithms for reactive robot.
In this paper a wall-following control of a mobile robot
is presented with the use of a laser sensor. The considered
robot is a deferentially steered robot; with two wheels driven
independently. Thus in the next chapter an analysis of existing
solutions for wall following used sensors and algorithms are
presented. This document is organised by first presenting
the used robot and machine states in section II, the virtual
environment assessment is presented in section III. In section
IV, the implemented algorithm for laser reading treatment and
TABLE I: Wall following algorithms and sensors .
Author
(Year)
Sensor Method Notes
Turennout
et al.
(1992)
Sonar
Sensor
Straight wall
following
Ando
et al.
(1995)
12 sonar
sensors
Finite-state
machine
No wall finding and
object collision avoid-
ance [3].
Carelli
et al.
(2003)
Sonar and
odometry
sensor
Corridor nav-
igation; wall-
following; ob-
ject avoidance.
State variables com-
bine the information
from the two sensors.
Toibero
et al.
(2009)
Laser
radar
sensor
and
odometry
Continuous
wall-following
controller,
obstacle
avoidance
with switching
scheme
Has no saturation of
angular velocity. Only
the steering angle is
controlled. Slow av-
erage speed of wall-
following (15cm/s).
Charifa
et al.
(2009)
Boundary-
following
algorithm
Artificial
potential fields
Has the local minima
problem. Needs prior
knowledge of the envi-
ronment.
Wei
et al.
(2017)
Laser
range
finder
Wall-following
and obstacle
avoidance
Move along a virtual
wall smoothly at adap-
tively adjusted speed
[1].
different virtual wall configurations is exposed and the results
are given in section V. Finally, a discussion of the developed
approach and future research is summarised.
II. SYSTEM STRUCTURE
The proposed algorithm flow is represented in Fig. 1. Thus,
the systems produces an action in response to a stimulus
of the environment. The admissible robot state machines are
1) Random wandering, for the initial state in which all the
sensor readings are further than 5m and the robot wonders
randomly; 2) Following wall, for the case where the robot has
found a wall, thus state (1) is not verified; 3) Rotating, in the
event of verification of positioning patters detailed in section
IV-C. Thus, the developed algorithm is much dependent on the
资源评论


锡城筱凯
- 粉丝: 3330
- 资源: 8









最新资源
- zigbee CC2530无线自组网协议栈系统代码实现协调器与终端基于GenericApp的无线收发例程.zip
- zigbee CC2530无线自组网协议栈系统代码实现协调器与终端无线收发控制LED灯.zip
- zigbee CC2530无线自组网协议栈系统代码实现协调器与终端之间的数据相互收发.zip
- zigbee CC2530无线自组网协议栈系统代码实现协议捕捉与数据分析.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集光敏传感器并发给协调器串口输出.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集气体传感器值发给协调器并串口打印.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集人体红外热释电传感器发送给协调器并串口输出.zip
- 功能完善的小说CMS系统项目全套技术资料.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集温度传感器DS18B20发送给协调器并串口打印输出.zip
- 食物营养分析-java-基于 SpringBoot 的食物营养分析与推荐网站的设计与实现(毕业论文)
- zigbee CC2530无线自组网协议栈系统代码实现终端采集温湿度传感器DHT11并发给协调器并串口打印输出.zip
- zigbee CC2530无线自组网协议栈系统的RemoTI源码.zip
- zigbee CC2530无线自组网协议栈系统之新建自己的Zstack工程模板(协调器、终端、路由器).zip
- 宠物救助及领养-java-基于springBoot的宠物救助及领养平台的设计与实现(毕业论文)
- 从基础到高级:Rust语言教程与编程实战
- 城市公交查询-java-基于springBoot的城市公交查询系统设计与实现(毕业论文)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


