结合历史运动状态的机器人高效沿墙算法研究.docx
版权申诉
173 浏览量
2023-02-23
20:14:47
上传
评论
收藏 3.52MB DOCX 举报

在室内环境中, 墙体是最基本的结构之一. 沿墙走是指机器人能够根据室内环境中墙
体的基本结构, 沿着墙体, 并与墙体保持一定距离的移动. 这可以看成是移动机器人的低层
行为, 当与其他高层的智能行为相结合时, 就可以完成一些复杂的任务
[1]
. 而对于室内移动
机器人来讲, 能否沿墙高效遍历是分辨室内移动机器人能力的重要条件. 在许多情况下, 都
需要机器人具备沿墙走这一功能, 比如室内地图的构建、路径规划
[2]
、避障
[3]
等.
目前, 国内外专家对室内机器人沿墙走的研究已有很多. 1992 年 Van Turennout 等
[4]
基
于移动机器人的运动学模型首次提出移动机器人沿墙走的概念, 并使用超声波传感器作为
测距工具, 设计了简单的沿墙走算法. 虽然实现了沿墙走行为, 但该算法会受累计误差的影
响, Ando 等
[5]
则利用单个声纳环
[6]
实现复杂室内环境机器人沿墙走的功能, 但没有考虑到传
感器自身的不足, 实验结果不理想. 王栋耀等
[1]
提出基于有限状态机的沿墙算法, 虽然对声
呐信息进行滤波处理后减小了声呐的镜面发射, 改善了沿墙走的效果, 但没有完全解决声呐
传感器镜面反射的问题. 针对这一问题, Wu 等
[7]
提出了基于红外传感器的沿墙控制算法, 使
用 5 个红外传感器对环境进行感知, 解决了声呐传感器的镜面反射问题, 降低了成本, 能够
实现沿墙走功能, 但收集的数据有限、精度低. 而周慧等
[8]
通过对数据的预处理克服了镜面
反射的问题, 但所使用的 DTW 算法受其自身测试数据长度的影响, 准确率较低. 李霞等
[9]
提出通过左右手法则实现沿墙走的功能, 即靠近、离开、远离、又接近墙体的规则实现沿
墙行走, 但所用的多个传感器会造成串扰, 影响系统精度. 还有学者提出通过视觉传感器
[10]
或激光雷达传感器
[11]
采集机器人与墙体的距离和角度信息, 利用模糊神经网络算法
[12-13]
, 将
输入数据融合, 判断机器人位姿信息, 通过控制左右轮速度控制其运动, 但模糊神经网络需
要规则库且离线训练困难. 以及采用 Q 学习算法
[14]
让机器人通过学习来自动构建导航控制
器, 利用对动作空间的 Q 值函数的优化获得控制, 从而实现沿墙走, 但 Q 学习算法的规则
手工建立困难.
虽然上述算法各有特点, 但大多存在一定的缺点, 因此本文采用室内未知环境下结合
历史状态的机器人沿墙高效遍历算法并使用激光雷达传感器实现室内移动机器人沿墙走的
功能. 该算法由移动机器人的上一个周期历史环境运动状态、当前环境运动状态和旋向信
息建立运动规则库, 沿墙行走时移动机器人时时采集这三类信息决定移动机器人当前的运
动方向, 如此循环直到完成指定的沿墙任务. 本文提出室内未知环境下结合历史状态的机器
人沿墙高效遍历算法, 用 Mealy 型有限状态机描述其运动状态, 并通过多次仿真实验以及
实际实验验证了本算法的可行性和高效性.
1. 室内未知环境下结合历史状态的机器人沿墙高效遍历算法
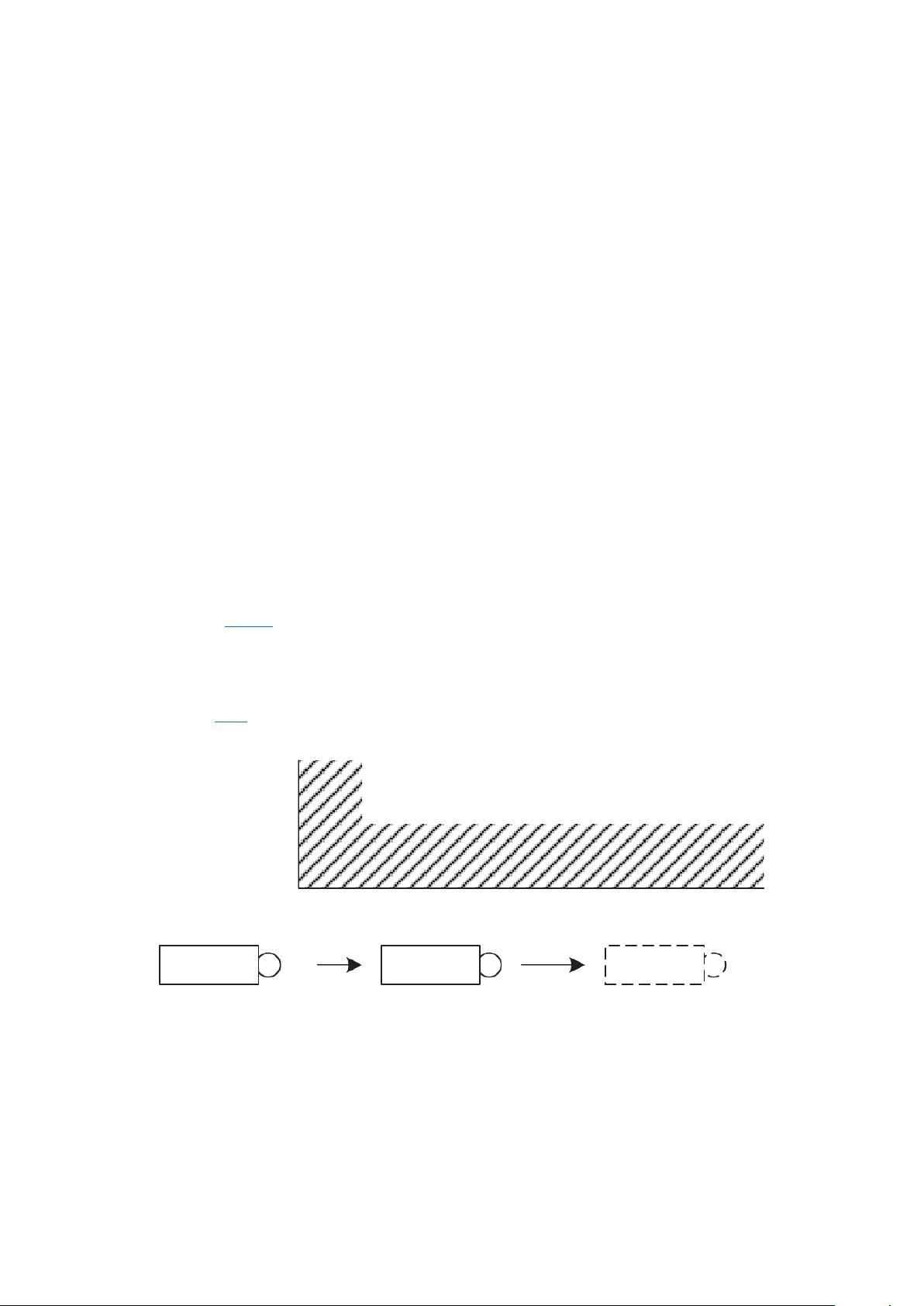
室内未知环境下结合历史状态的机器人沿墙高效遍历研究提出根据移动机器人上的激
光雷达对障碍物的反馈, 判断移动机器人当前位置的前方、左方以及右方是否存在障碍物,
并根据障碍物的存在位置描述移动机器人的运动环境状态. 当前状态为[Math Processing
Error]t 时刻移动机器人所在位置的障碍物存在情况用[Math Processing Error]k 表示, 即当


剩余35页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3652
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











