TMC2209内部配置说明(译文)
需积分: 15 108 浏览量
2023-03-05
16:44:34
上传
评论 2
收藏 2.34MB PDF 举报


1.2 控制接口
TMC2209 支持用于基本模式选择的离散控制线和基于 UART 的带 CRC 校验的单线接口。当发送正确的 UART
数据时,UART 接口自动启用。当使用 UART 时,引脚选择可能被控制位禁用。
1.2.1 UART 接口
单线接口允许单向操作(仅用于参数设置),或双向操作用于完全控制和诊断。它可以由任何标准的微控制
器 UART 驱动,甚至可以由软件中的位触发驱动。可以使用从 9600 波特到 500k 波特甚至更高的波特率(当
使用外部时钟时)。不需要波特率配置,因为 TMC2209 自动适应主机的波特率。帧格式与智能 TRINAMIC 控
制器和驱动器 IC TMC5130、TMC516x 和 TMC5072 相同。CRC 校验和允许远距离数据传输。对于固定的初始
化序列,将包括 CRC 在内的数据存储到μC 中,因此,完全初始化只需消耗几百字节的代码。如果不需要,
CRC 可以在读取访问期间被忽略。这使得 CRC 使用了一个可选功能!IC 支持四个地址设置,以便在单个总
线上访问最多四个 IC。如果不需要读取访问,通过将所有接口引脚连接在一起,甚至可以并行编程更多的
驱动器。模拟多路复用器(如 74HC4066)可以提供可选的寻址。从软件角度来看,TMC2209 是一个具有多
个控制和状态寄存器的外围设备。它们中的大多数既可以是只写的,也可以是只读。一些寄存器允许读和
写访问。如果只写寄存器需要读修改写访问,请在主软件中实现影子寄存器。
1.3 移动和控制电机
1.3.1 STEP/DIR 接口
电机由步进和方向输入控制。STEP 输入上的有效边沿可以是上升边沿或上升边沿和下降边沿,由特殊模式
位(DEDGE)控制。使用两个边沿将 STEP 信号的触发速率减半,这对于通过慢速接口进行通信非常有用
例如光学隔离界面。在有效步进边沿上从 DIR 输入采样的状态确定是前进还是后退。每个步骤可以是一个
完整步骤或一个微步,其中每个完整步骤有 2、4、8、16、32、64、128 或 256 个微步。DIR 上状态为低的
步进脉冲增加微步计数器,而状态为高的步进将计数器减少由微步分辨率控制的量。内部表格将计数器值
转换为正弦和余弦值,用于控制微步进电机电流。
1.3.2 内部步进脉冲发生器
有些应用不需要精确的协调运动——电机只需要以一定的速度移动一定的时间。TMC2209 配有内部脉冲发
生器,用于这些应用:只需通过 UART 接口提供速度,即可移动电机。速度符号自动控制运动的方向。然而,
脉冲发生器不集成斜坡功能。较高速度下的运动需要通过软件增加和降低速度值。
STEP/DIR 模式和内部脉冲发生器模式可以在应用中混合使用!
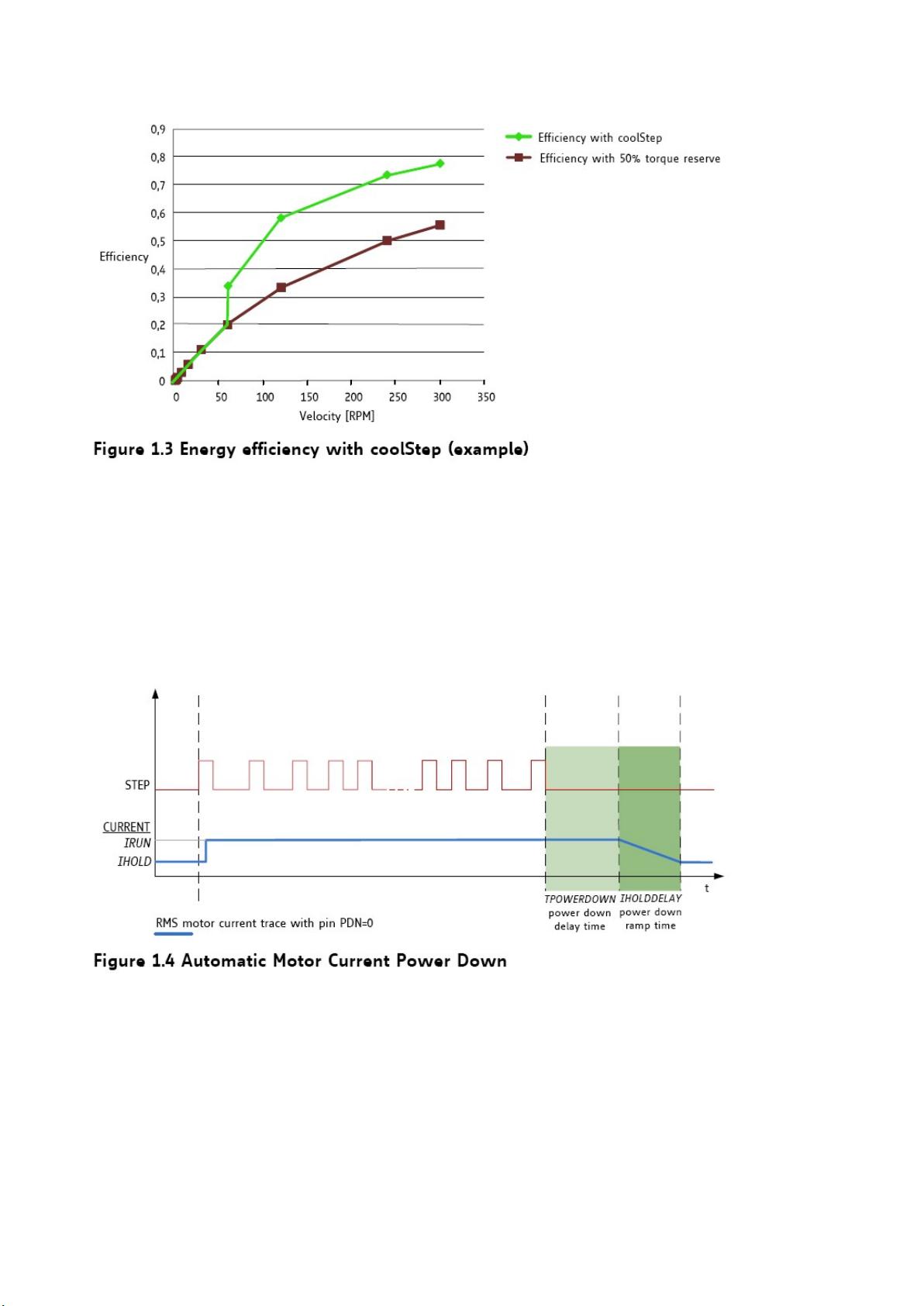
1.4 StealthChop2 和 SpreadCycle 驱动器
StealthChop 是一种基于电压斩波器的原理。它特别保证电机在静止和慢速运动时绝对安静,滚珠轴承产生

剩余32页未读,继续阅读
资源评论


x464839941
- 粉丝: 1
- 资源: 14









最新资源
- 20240420-扬州高中小学部风雨操场转换层条件图r.dwg
- 小猫咪邮件在线发送系统源码v1.1,支持添加附件
- 永磁电机铜耗估算表-Excel-v1.0
- 参考资料-人工智能对劳动力市场的影响机制研究.pdf
- 协同供应链集成产品介绍V71sp1.rar
- 上市公司-人工智能的采纳程度面板数据(2003-2021年).xlsx
- 参考资料-人工智能技术应用对就业的影响及作用机制研究-来自制造业企业的微观证据.pdf
- 第5章spring-mvc请求映射处理
- 2023-04-06-项目笔记 - 第一百十六阶段 - 4.4.2.114全局变量的作用域-114 -2024.04.27
- 协同供应链集成产品介绍V70.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


