








Efficient Image Dehazing with Boundary Constraint and
Contextual Regularization
Gaofeng MENG, Ying WANG, Jiangyong DUAN, Shiming XIANG, Chunhong PAN
National Laboratory of Pattern Recognition
Institute of Automation, Chinese Academy of Science, Beijing, P.R. China
Email:{gfmeng,ywang,jyduan,smxiang,chpan}@nlpr.ia.ac.cn
Abstract—Images captured in foggy weather conditions often
suffer from bad visibility. In this paper, we propose an efficient
regularization method to remove hazes from a single input
image. Our method benefits much from an exploration on the
inherent boundary constraint on the transmission function.
This constraint, combined with a weighted L
1
−norm based
contextual regularization, is modeled into an optimization
problem to estimate the unknown scene transmission. A quite
efficient algorithm based on variable splitting is also presented
to solve the problem. The proposed method requires only
a few general assumptions and can restore a high-quality
haze-free image with faithful colors and fine image details.
Experimental results on a variety of haze images demonstrate
the effectiveness and efficiency of the proposed method.
Keywords-image processing; single image dehazing; visibility
enhancement;
I. INTRODUCTION
When one takes a picture in foggy weather conditions, the
obtained image often suffers from poor visibility. The distant
objects in the fog lose the contrasts and get blurred with
their surroundings, as illustrated in Figure 1. This is because
the reflected light from these objects, before it reaches the
camera, is attenuated in the air and further blended with
the atmospheric light scattered by some aerosols (e.g., dust
and water-droplets). Also for this reason, the colors of these
objects get faded and become much similar to the fog, the
similarity of which depending on the distances of them to
the camera.
Early methods for haze removal mainly rely on additional
depth information or multiple observations of the same
scene. Representative works include [11], [9], [10], [12].
Schechner et al. [11] notice that the airlight scattered by
atmospheric particles is partially polarized. Based on this
observation, they develop a quick method to reduce hazes
by using two images taken through a polarizer at different
angles. Narasimhan et al. propose a physics-based scattering
model [9], [10]. By this model, the scene structure can be
recovered from two or more weather images. Kopf et al.
[6] propose to dehaze an image by using the scene depth
information directly accessible in the georeferenced digital
terrain or city models.
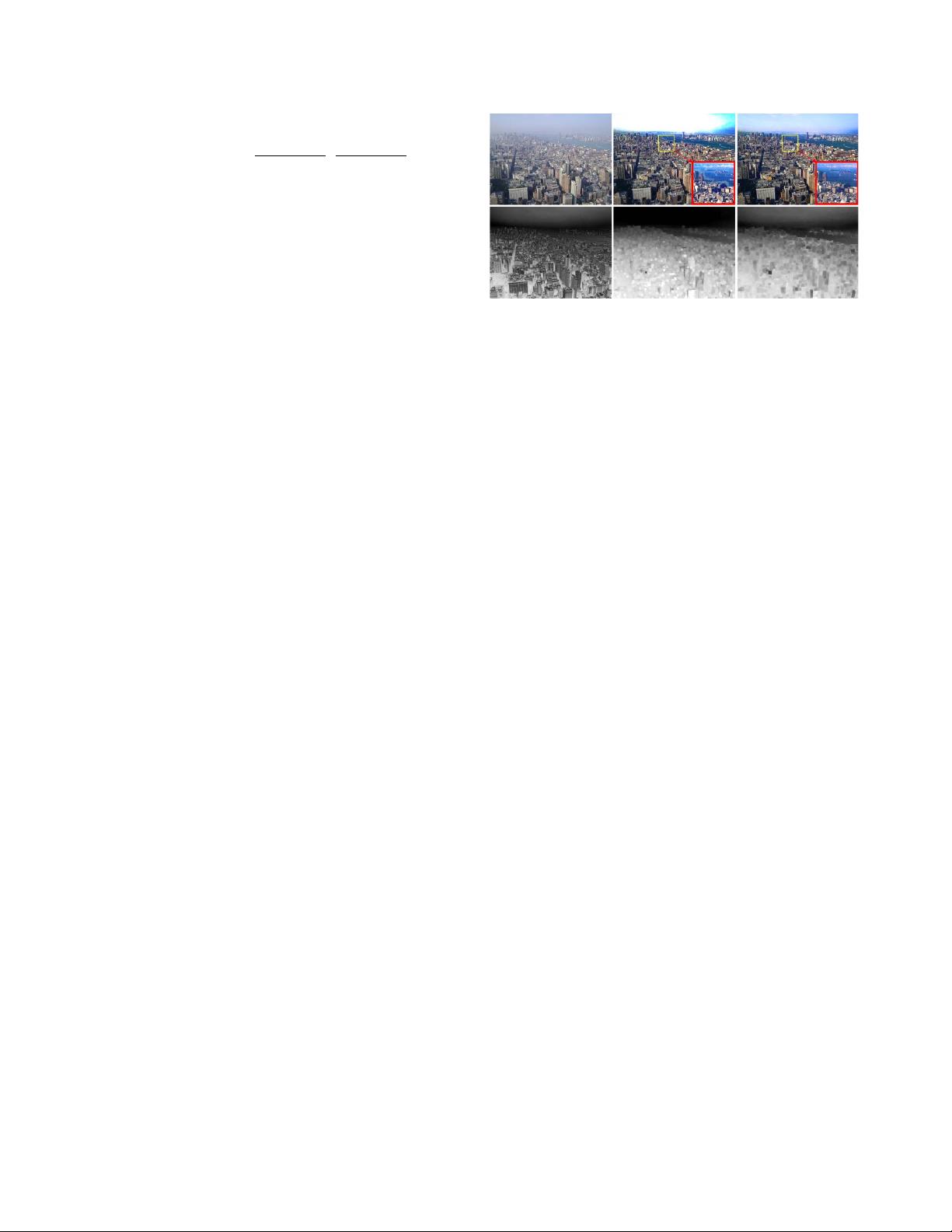
Figure 1. Image dehazing result by our method. From left to right: (Top)
the foggy image and the dehazing result by our method. (Bottom) the
boundary constraint map and the recovered scene transmission.
Single image dehazing, in contrast, is a more challenging
problem, since fewer information about the scene structure
is available. Recently, some significant advances have also
been achieved [4], [13], [5], [14], [7], [8]. These progresses
benefit much from the insightful explorations on new image
models and priors. Fattal [4] proposes a refined image forma-
tion model to account for the surface shading and the scene
transmission. Under the assumption that the two functions
are locally statistically uncorrelated, a haze image can be
broken into regions of constant albedo, from which the scene
transmission can be inferred. Tan [13] proposes to enhance
the visibility of a haze image by maximizing its local
contrast. His method can generate quite compelling results,
especially in regions with very dense hazes. However, since
it is not a physics-based method, the restored image often
suffers from distorted colors and significant halos.
He et al. [5] present an interesting image prior - dark
channel prior for single image dehazing. This prior comes
from an observation that most local patches in haze-free
images often contain some low intensity pixels. The prior,
2013 IEEE International Conference on Computer Vision
1550-5499/13 $31.00 © 2013 IEEE
DOI 10.1109/ICCV.2013.82
617













评论1