《复杂控制系统》的学习教案主要探讨了前馈控制这一主题,这是一种在工业自动化和控制系统中常见的策略。前馈控制与反馈控制相比,具有独特的特性和优势。
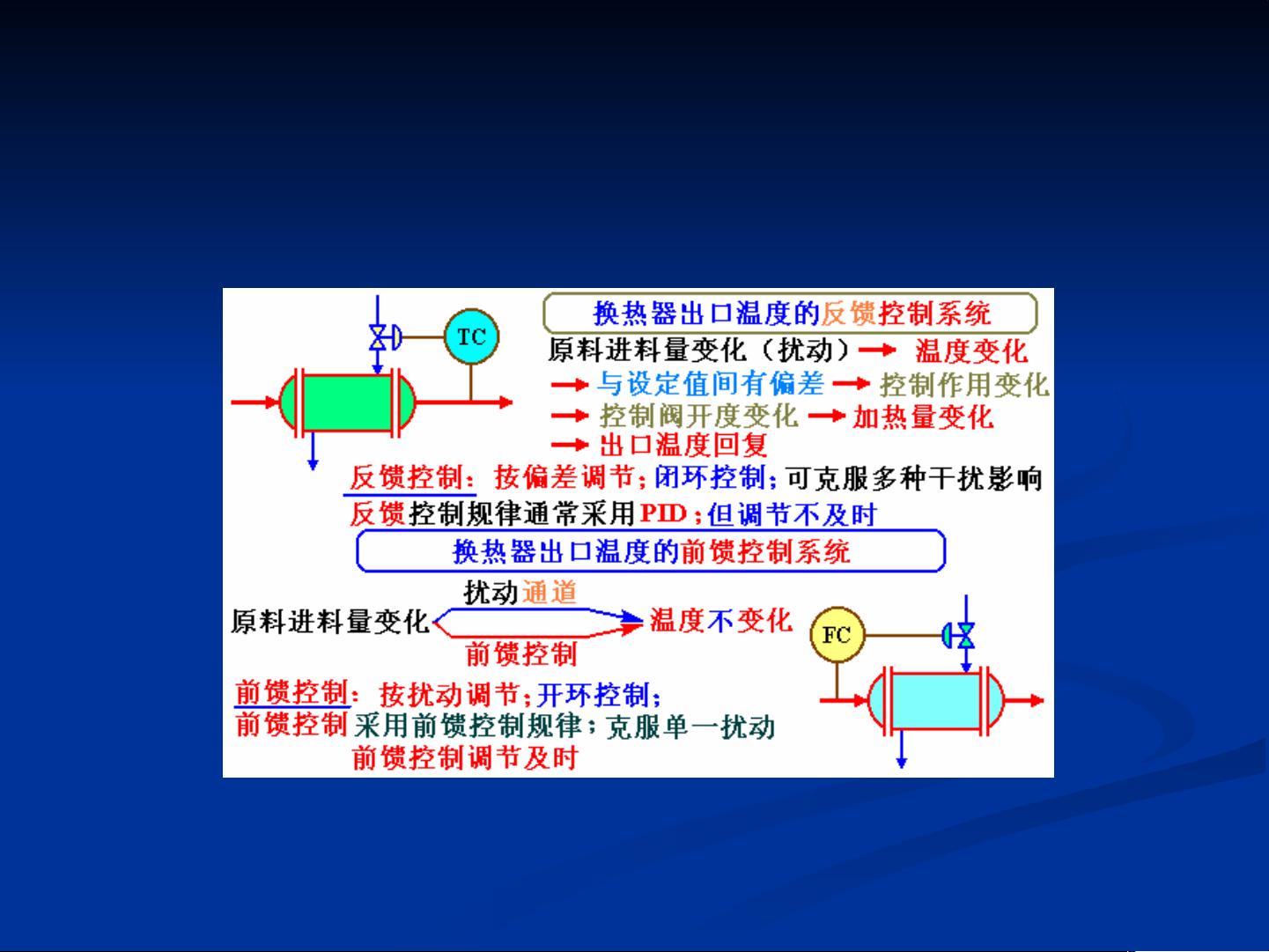
前馈控制是一种开环控制方式,它根据预期的扰动或设定值的变化来提前进行补偿。与反馈控制不同,反馈控制仅在系统出现偏差时进行调节,而前馈控制则在扰动发生且尚未影响到被控变量时就采取行动,旨在消除或抵消扰动对系统的影响。这种控制方式适用于那些扰动显著,且对控制精度要求高的场合。
前馈控制与反馈控制有明显的区别:反馈控制依赖于实际的偏差信号,通过闭环回路实现精确控制,而前馈控制则基于预估的扰动进行控制,可能只能实现近似的控制。前馈控制器的模型通常包括扰动模型和补偿器,但其设计面临一些挑战,如扰动模型的准确性、多个扰动的存在、不可测量或难以测量的扰动,以及缺乏控制效果的直接验证。
为解决这些局限,前馈-反馈控制系统的概念应运而生。这种组合控制系统结合了前馈控制的快速响应和反馈控制的精确性。相乘式前馈-反馈控制系统中,前馈控制作用与反馈控制作用相乘,而在相加式系统中,两者的作用相加。这种设计能有效应对多个扰动变量,并提高整体控制性能。
多变量前馈控制系统进一步扩展了这一理念,适用于存在多个扰动变量的情况。它可以是多输入单输出(MISO)或多输入多输出(MIMO)形式,用以减少或消除不同扰动变量间的影响。
前馈控制系统的性能分析、设计和工程应用是重要的研究领域。选择合适的扰动变量(可测但不可控、影响显著且变化频繁)是关键,而控制规律的设计则需确保能够有效地抵消扰动。前馈控制常用于处理对象滞后严重、反馈控制响应慢、系统稳定性差或控制质量要求高的情况。
前馈控制作为复杂控制系统的一部分,提供了预测和预防性控制的能力,对于提升系统的响应速度和控制效果有着重要作用。理解并熟练运用前馈控制理论和技术,对于优化工业过程和自动化系统的性能至关重要。