
视觉伺服产品调研:
Fanuc iR Vision 2DV 视觉系统:该视觉系统有一个安装于手爪上的2D 摄像头完成视
觉数据采集。该视觉系统作为待加工工件准确抓取的定位方式,省区通常为满足机器人的准
确抓取而必须采用的机械预定位夹具,具有很高的柔性,使得在加工中心上可以非常容易地
实现多产品混合生产。
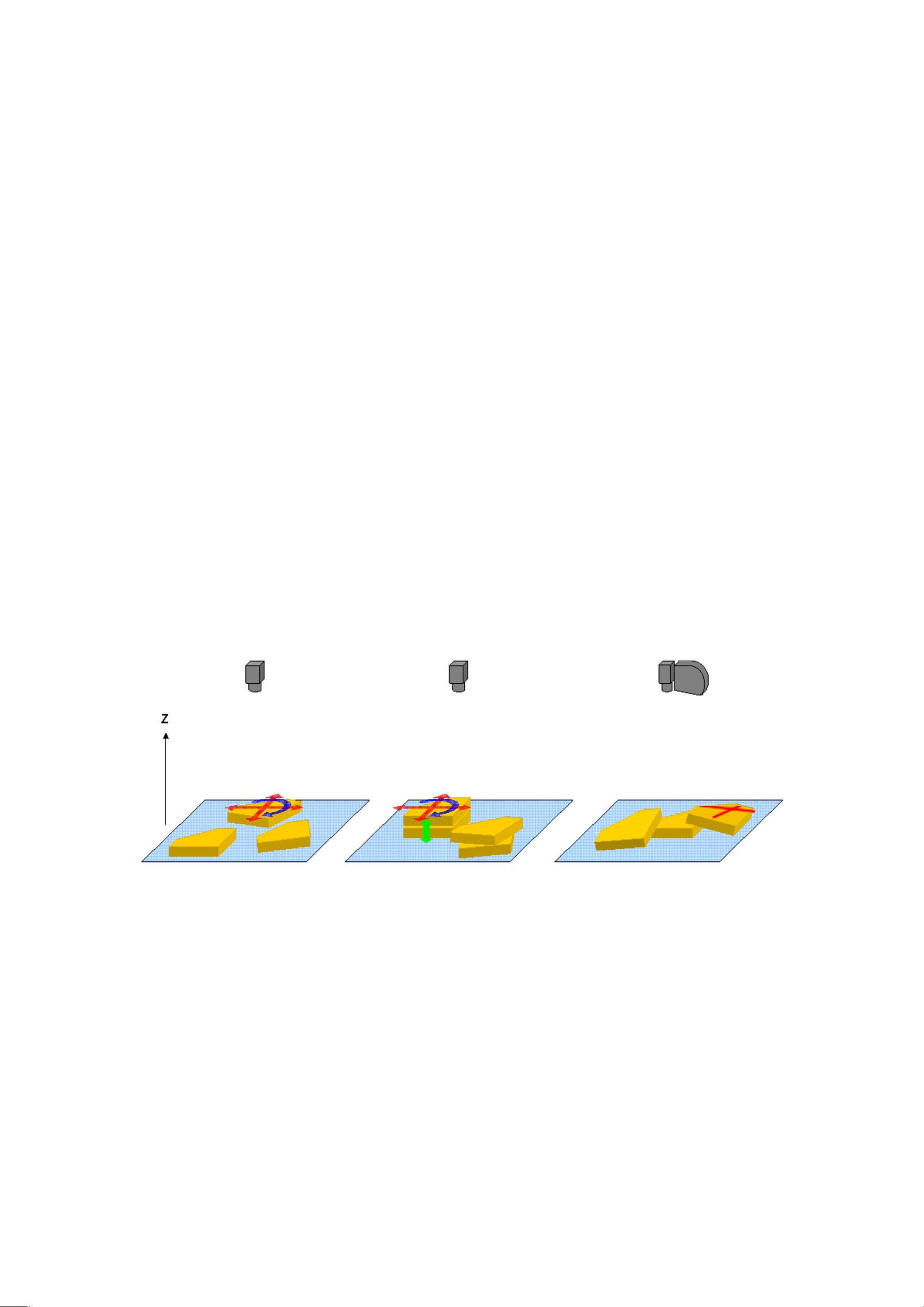
FANUC iR Vision 3DL视觉系统:该视觉系统由摄像机与一个安装于地面上的3D Laser
Sensor 完成视觉数据采集。该视觉系统解决了定位面有偏差的工件上料位置变化问题。由
于待加工工件为毛坯件,机器人抓取工件后,上料的定位孔位置会发生变化,甚至工件上料
时的平面度也有变化。该技术可以自动补偿位置变化,实现高精度上料。
具体的分类如下:
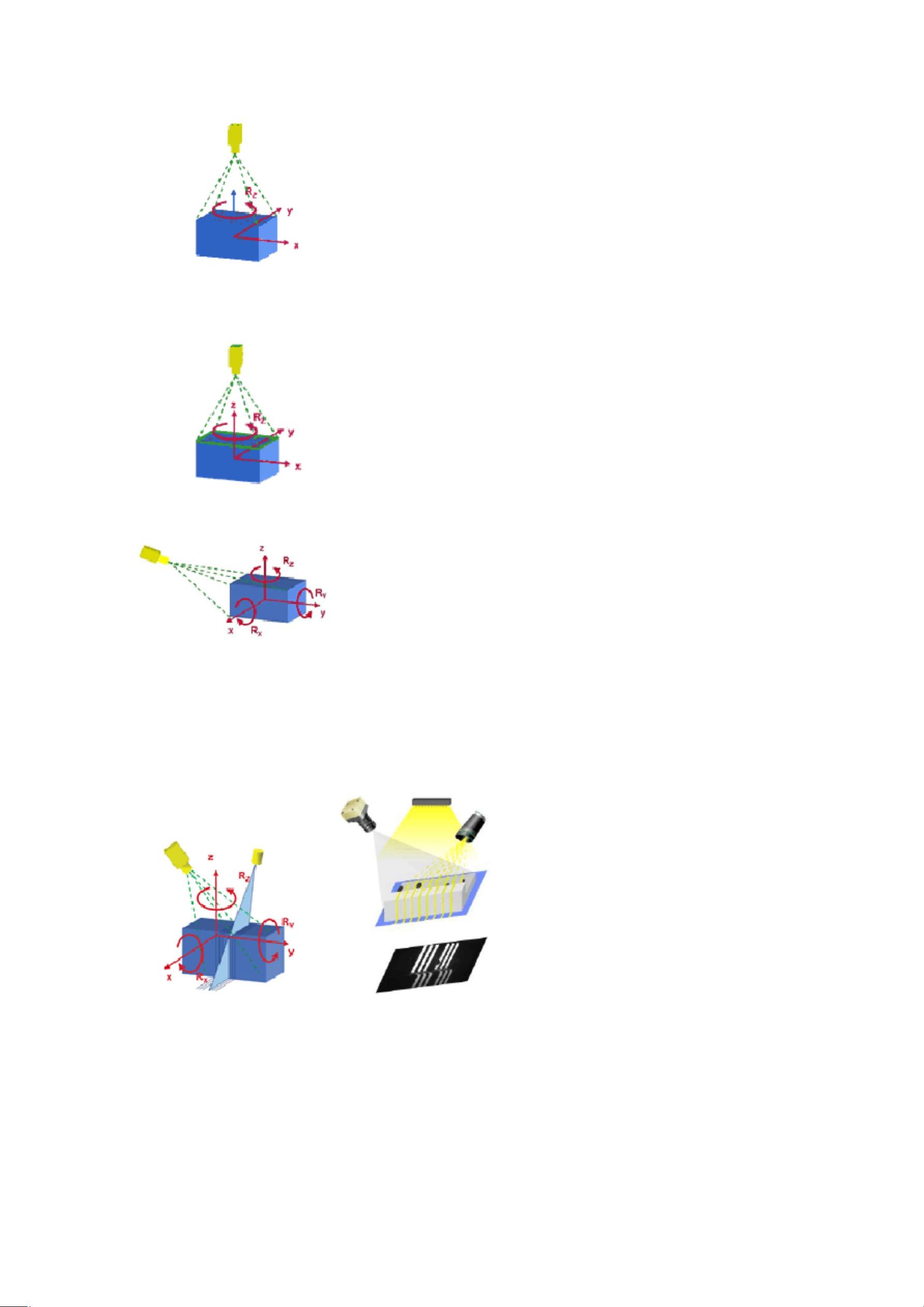
1. 测量方式分类:
a) 2D 单视野检测 (2D Single-View)
b) 2D 多视野检测 (2D Multi-View)
iRVision 2D 只用于检测平面移动的目标 (XY 轴位移、Z 轴旋转角度 R)。其中,用户
坐标系必须平行于目标移动的平面,目标在 Z 轴方向上的高度必须保持不变。目标在 XY 轴
方向上的旋转角度不会被计算在内。
c) 2.5D 单视野检测 (2.5D Single-View / Depalletization)
IRVision 2.5D 比较 iRVision 2D,除检测目标平面位移与旋转外,还可以检测Z 轴方
向上的目标高度变化。目标在 XY 轴方向上的旋转角度不会被计算在内。
d) 3D 单视野检测 (3D Single-View)
e) 3D 多视野检测 (3D Multi-View)
iRVision 3D 用于检测目标 3 维内的位移与旋转角度变化。
3D 检测
2. 照相机安装方式分类:
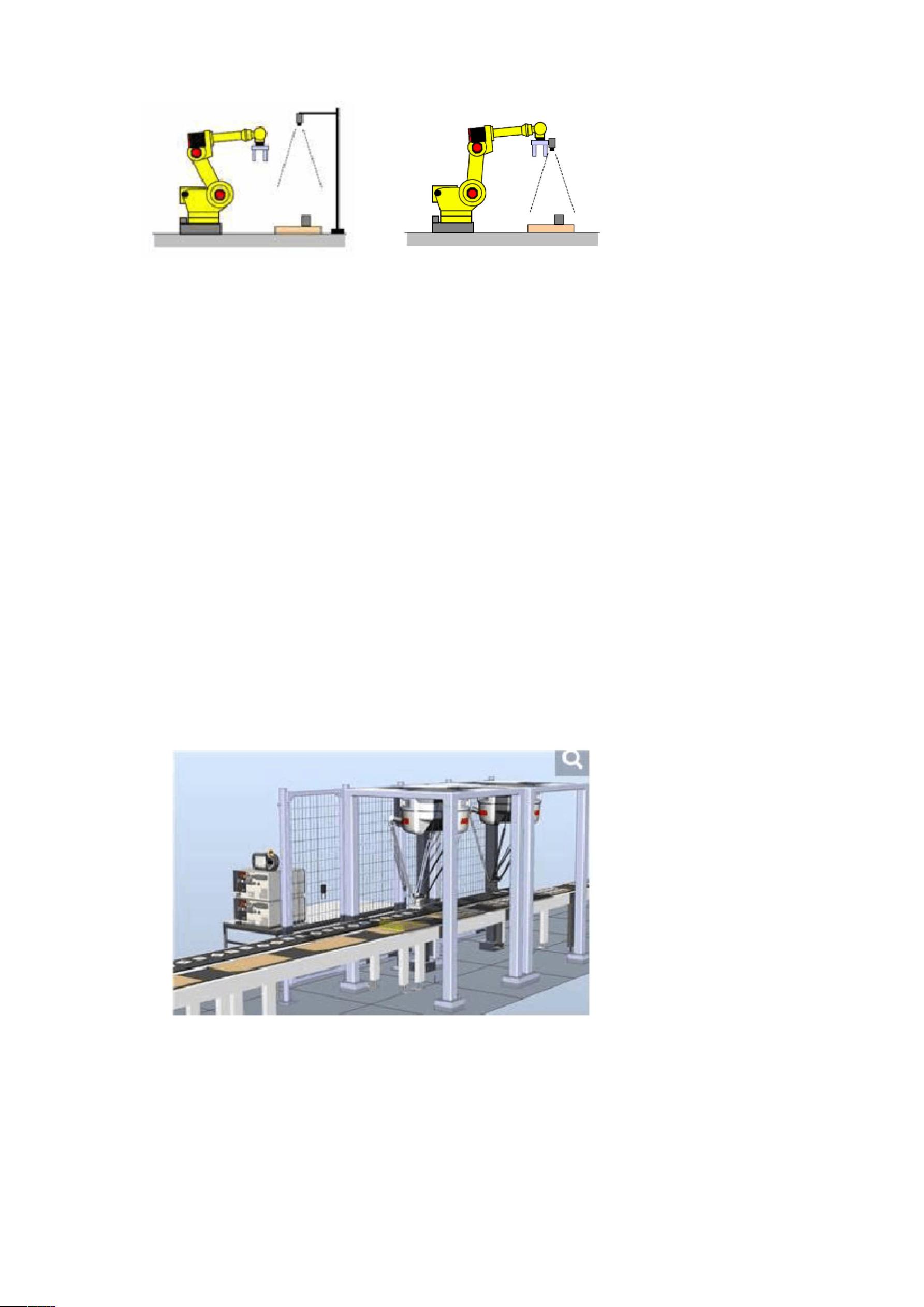
a) 固定照相机 (fixed camera)
优点:可以在机器人运动时照相。 照相机连接电缆铺设简易化。
缺点:检测区域固定化。如果因外界因素导致照相机和机器人间相对位置变更,必须重
新校订相机。
b) 照相机固定在机器人上 (robot-mounted camera)
优点:检测区域可以随机器人变化,整体检测范围增加。较大的照相机焦距使用可能,
检测精度提升易拓展再检测功能。
缺点:机器人必须停止照相。必须注意光源是否被机器人或外围设备干涉。必须注意照
相机连接电缆的磨损现象。
剩余14页未读,继续阅读
资源评论


想要offer
- 粉丝: 4076
- 资源: 1万+









最新资源
- 2021新消费品牌数字化报告.pdf
- 2021中国新锐品牌发展研究:食品饮料行业报告.pdf
- 2021新消费后浪黑马品牌发展洞察-易观.pdf
- 解决 “今天中午吃什么” 的超实用帮手来袭
- 2021中国自主品牌汽车市场研究报告.pdf
- 2022抖音电商新品牌成长报告.pdf
- 华润线下门店引流实操案例复盘.pdf
- 国产彩妆品牌社媒营销案例研究.pdf
- 国货彩妆品牌Q1社媒营销投放分析报告.pdf
- 瑞幸私域案例拆解.pdf
- 品牌私域流量体系运营sop.xlsx
- 奈雪的茶私域案例拆解.pdf
- 新品牌层出不穷,咖啡品牌当如何以消费者为核心,破局而出?202111.pdf
- 瑞幸咖啡企业微信群话术及人设搭建SOP.xlsx
- 完美日记企业微信群发售话术及人设搭建SOP.xlsx
- 企业微信最全养号、防封、加人机制.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


