没有合适的资源?快使用搜索试试~
我知道了~
文库首页
行业研究
行业报告
视觉伺服控制.docx
视觉伺服控制.docx
1.该资源内容由用户上传,如若侵权请联系客服进行举报
2.虚拟产品一经售出概不退款(资源遇到问题,请及时私信上传者)
版权申诉
0 下载量
180 浏览量
2022-11-11
20:41:59
上传
评论
收藏
1.3MB
DOCX
举报
温馨提示
五一特惠:¥4.90
14.90
。。。
资源推荐
资源详情
资源评论
视觉伺服控制算法优化综述.docx
浏览:147
。。。
基于机器视觉的机器人伺服控制系统.docx
浏览:38
。。。
机器人视觉伺服控制中的目标识别.doc
浏览:63
机器人视觉伺服控制中的目标识别.doc
机器人视觉伺服的发展现状.docx
浏览:177
。。。
视觉伺服产品调研.docx
浏览:186
。。。
面向旋翼无人机目标追踪的解耦视觉伺服方法.docx
浏览:99
。。。
基于视觉伺服技术的工业机器人高动态物体跟踪系统.docx
浏览:83
基于视觉伺服技术的工业机器人高动态物体跟踪系统.docx
机器人视觉伺服系统的控制结构.docx
浏览:125
。。。
无标定视觉伺服在机器人跟踪多特征点目标的应用中国电气传.docx
浏览:110
无标定视觉伺服在机器人跟踪多特征点目标的应用中国电气传.docx
机器人视觉伺服控制应用研究.pdf
浏览:170
#资源达人分享计划#
机器人视觉伺服控制研究进展与挑战.pdf
浏览:165
机器人视觉伺服控制研究进展与挑战.pdf
UP6机械手的双目视觉伺服控制研究
浏览:21
UP6机械手的双目视觉伺服控制研究 硕士研究生优秀学位论文
基于图像的机器人视觉伺服控制研究
浏览:132
4星 · 用户满意度95%
基于图像的机器人视觉伺服控制研究 文档 供大家下载研究
视觉引导工业机器人伺服控制系统设计.docx
浏览:48
//
机器人无标定视觉伺服系统设计与实现.docx
浏览:173
校外实训基地合作协议书.pdf
机器人视觉伺服技术发展概况综述概要.docx
浏览:108
政府学校企业三方合作框架协议..pdf
微操作机器人系统.docx
浏览:64
经过几年的技术贮备,研究要点开始由各单元技术转向系统集成及应用,如微操作系统的数学模型、微动仿活力构综合理论、鉴于图像的视觉伺服理论、精美微操作系统的光 - 机- 电集成设计方法等,并把生物工程作为微操作...
walker机器人作文.docx
浏览:61
可不能小瞧了这位仅有4岁的"新时代深圳人",之前智东西也多次关注报道过Walker机器人,它身高1.45米,具备优良的硬件素质、卓越的运动能力及AI交互表现,不仅有36个高性能伺服关节以及力觉反馈系统,还拥有视觉、...
机器人无标定视觉伺服控制研究进展
浏览:164
关于机器人无标定视觉伺服控制研究进展的综述介绍,了解视觉伺服的发展和现状,针对性的提出发展方向和改进方法
基于仿人智能控制的无标定视觉伺服
浏览:187
设计了无标定视觉伺服的仿人智能控制器,仿真完成了无标定双目视觉下机械臂的五自由度运动空间定位。选取点特征作为双目视觉图像特征,设计了视觉特征模型与多模态视觉伺服控制器,并在Matlab平台下设计了五自由度运动空间的视觉定位仿真实验,验证了方法的有效性。
遗传算法在机器人视觉伺服控制中的应用.pdf
浏览:174
遗传算法在机器人视觉伺服控制中的应用.pdf
基于神经网络的机器人视觉伺服控制
浏览:167
4星 · 用户满意度95%
: 视觉伺服可以应用于机器人初始定位自动导引、 自动避障、 轨线跟踪和运动目标跟踪等控制系统中。 传统的视觉伺服系统在运行时包括工作空间定位和动力学逆运算两个过程,需要实时计算视觉雅可比矩阵 和机器人逆雅可比矩阵,计算量大,系统结构复杂。本文分析了基于图像的机器人视觉伺服的基本原理, 使用 BP 神经网络来确定达到指定位姿所需要的关节角度,将视觉信息直接融入伺服过程,在保证伺服精 度的情况下大大简
多关节机器人问题的简单介绍.docx
浏览:148
工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它...
自由度机器人视觉伺服控制MATLAB
浏览:153
5星 · 资源好评率100%
MATLAB代码,实现六自由度机器人的视觉伺服控制,代码运行前需要配置机器人工具箱
6自由度机器人视觉伺服控制MATLAB
浏览:132
4星 · 用户满意度95%
MATLAB代码,实现六自由度机器人的视觉伺服控制,代码运行前需要配置机器人工具箱
直流电机调速伺服控制.docx
浏览:183
直流电机调速伺服控制(pid控制,模糊控制,bp神经网络控制)
三菱PLC3U与伺服J3控制.docx
浏览:113
。
有约束的无标定模型预测控制
c
s
(
t
)
m
T
c
决于摄像机的内部参数和外部参数。
H
表示机器人正向运动学的齐次变换矩阵,
和
分别是
H
的旋转矩阵和平移矢量。在眼在手上摄像机构型中
,
H
p
C
BH
ec
ec
阵。
B
是相机的内参数矩阵,由相机内部结构决定。
,其中
为末端
H
H
eb
eb
b
b
是相机外参数矩阵,它表示机器人基坐标系相对于相机坐标
C
BH
H
b
通过对式
(4.1)
微分,有视觉变化与关节速度的关系:
m
是与深度无关的相互作用矩阵,形式为:
A(s
(t), q(t))
m
2
n
2
3
可以由未知参数表示如下:
Z (t)
c
c
每个特征点的离散状态空间模型可写为:
x
(
k
1)
Fx
(
k
)
G
(
k
)
u
(
k
)
c
常数矩阵,
G
(
k
)
是时变变量和未知常数参数的函数:
G
(
k
)
2
2
s
k
n
m
c
入,即关节速度
q
(
k
)
。
s
d
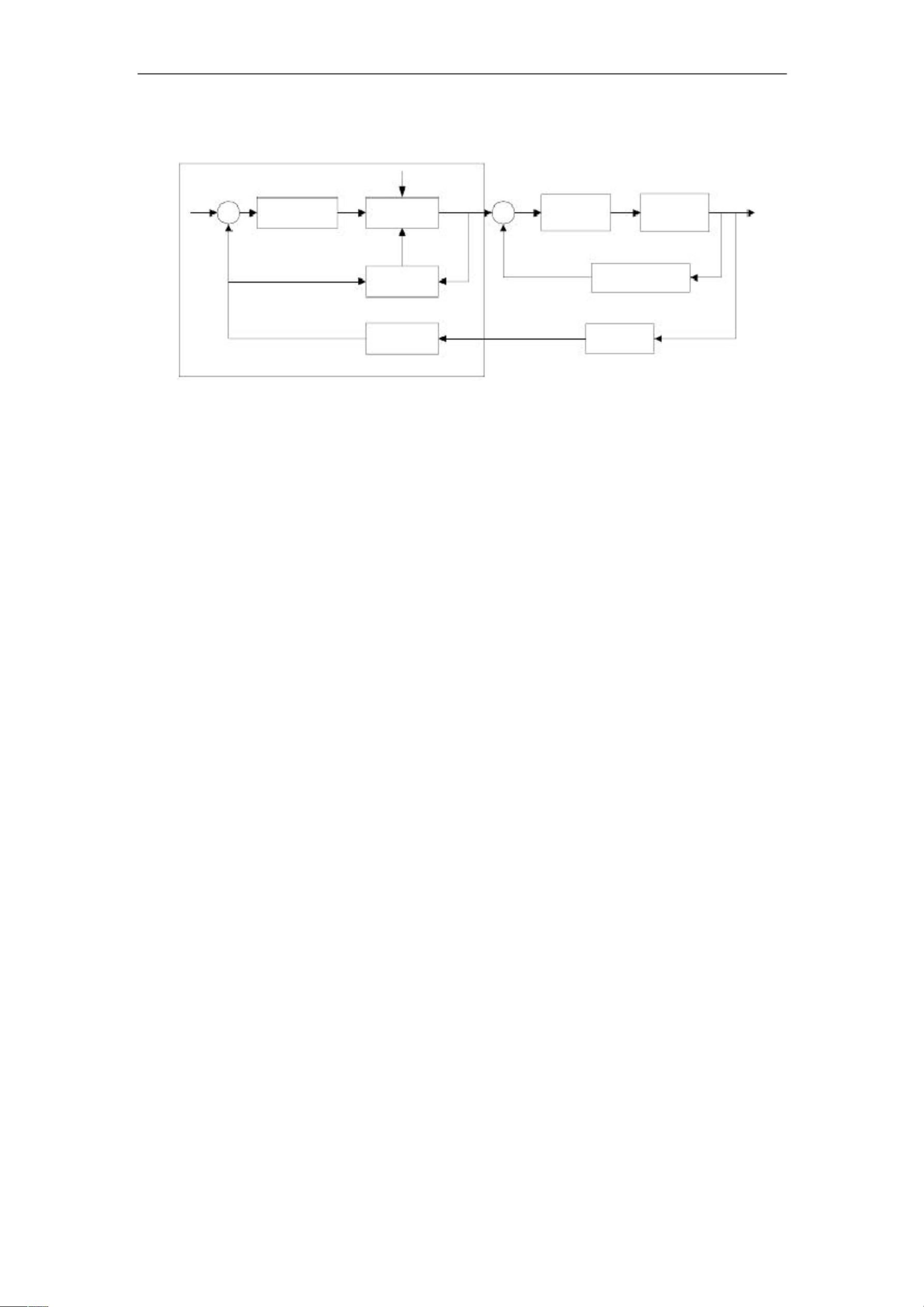
觉伺服跟踪任务是使特征点在图像平面上跟踪期望的轨迹。
。机器
人视
觉系统
的控
制方案
如图
4.1
所示。
m
视觉伺服
约束
d
m
有约束无标
定
IBVS
的模型预测控制
通过使用
M
PC
,可以通过如下步骤实现控制:
(1)
采用模型对
IBVS
系统的未来行为进行预测。根据预测模型
(4.5)
,图像
p
m
(
k
m
)
F s
是预测
s
范围。该动
(
k
态
)
预测模
F
型在每个
G
(
采
k
样
时
m
刻以
i
有
)
u
(
限
k
的
m
步
i
)
预测特征点
N
N
p
m
m
i
1
p
表示控制水平,它表示控制输入的自由度数目
。此外,
s
N
N
m
c
c
p
了最优问题的自由度数目,提高了在线最优控制问题数值解的计算速度。从
u
(
k
N
1)
到
u
(
k
N
p
[80]
。更新模型参数将在下一
1)
,控制输入等于
小节中提及。预测模型在每个采样时间
在线更新。
u
(
k
c
c
k
min
c
c
max
min
m
m
通过考虑
IBVS
系统的输入和输出约束的
MPC
策略可以写成:
min
J
(
(
k
),
U
(
k
))
c
c
c
N
c
c
c
p
T
m
m
(
k
d
m
c
c
c
s
s
m
d
i
[
k
1,
k
p
min
max
关节速度约束的变化,可以有效地抑制关节速度的突变:
min
max
式子
(4.16)
和
(4.17)
都是
IBVS
系统的输入约束。
m
U
c
N
p
(
s
(
k
i
)
s
(
k
i
))
Q
(
s
(
k
i
)
s
(
k
i
))
i
1
c
d
m
T
d
m
N
c
(
k
i
1)
R
(
u
i
1
c
c
u
N
p
m
d
第二项最小化有限控制范围
N
上控制输入的变化。
Q
和
c
二项的对称加权矩阵。
规划
(SQP)
算法计算约束条件下的可行解,得到
N
c
c
剩余23页未读,
继续阅读
评论
收藏
内容反馈
1.该资源内容由用户上传,如若侵权请联系客服进行举报
2.虚拟产品一经售出概不退款(资源遇到问题,请及时私信上传者)
版权申诉
五一特惠:¥4.90
14.90
资源评论
资源反馈
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~
联系上传者
评论
春哥111
粉丝: 1w+
资源:
5万+
私信
上传资源 快速赚钱
我的内容管理
展开
我的资源
快来上传第一个资源
我的收益
登录查看自己的收益
我的积分
登录查看自己的积分
我的C币
登录后查看C币余额
我的收藏
我的下载
下载帮助
前往需求广场,查看用户热搜
最新资源
sql server专题实验6 视图的应用
悟空机器人拆解.zip
优必选悟空机器人拆解教程.pdf
汽车租赁(ssm+layui).zip
2198797364396麦购-NEW+AUX(抢回流免费.apk
python爬虫的概要介绍与分析
TG-2024-04-26-183849310.mp4
汇编语言的概要介绍与分析
个人博客系统设计与开发.zip
2023-04-06-项目笔记 - 第一百十五阶段 - 4.4.2.113全局变量的作用域-113 -2024.04.26
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈
安全验证
文档复制为VIP权益,开通VIP直接复制
信息提交成功