

摘要
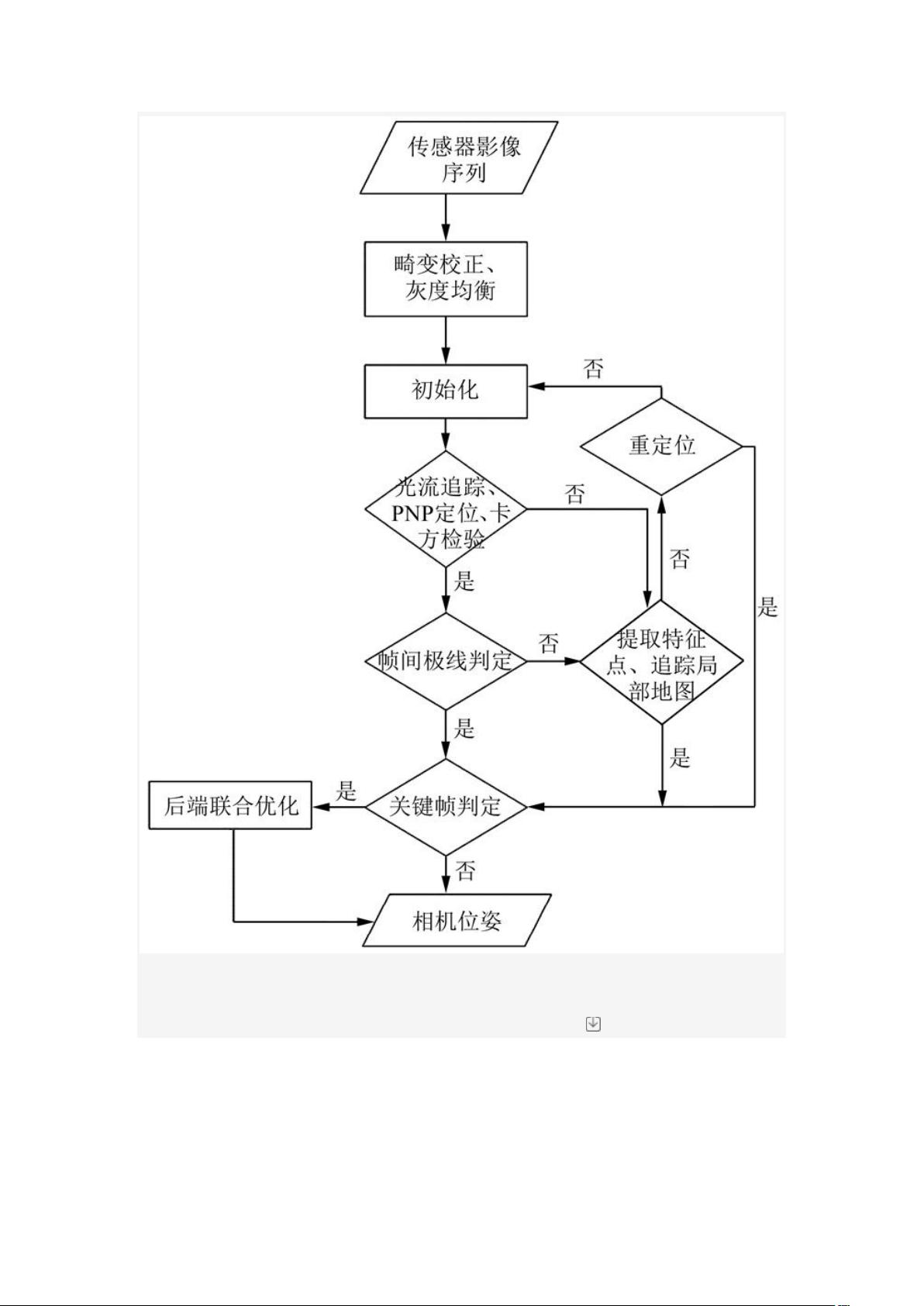
针对特征点法视觉里程计(visual odometry, VO)中,描述子匹配算力要求较高,而光流追踪算法
存在误差累积的问题,提出了一种双目混合追踪的视觉里程计算法,并通过实验对该方法的定位结
果与计算效率进行分析。在该算法中,前端在影像关键帧提取 ORB(oriented brief)特征点并生成
路标点,优先采用 Inverse Compositional 光流进行追踪,使用卡方检验等检测外点;为检测定
位粗差,提出通过由相邻帧位姿恢复的极线进行检验;光流追踪失败或未通过极线检验时,提取
ORB 特征点维持跟踪或进行重定位;同时,后端进行相机位姿、路标点联合优化以减小误差累积。
实验结果表明,该算法定位精度低于 ORB-SLAM2(simultaneous location and mapping)算法,
但运算效率有明显提升。
Abstract
Considering the heavy computation requirment of descriptors matching in key point
visual odometry, and the accumulated error caused by optical flow tracking, we
propose the hybrid tracking algorithm for stereo camera and analyze its orientation
results and calculation efficiency through experiments. In the front end, ORB feature
points are extracted in the key frames of images and generated as waypoints and
tracked via inverse compositional optical flow, then chi-square test is used to check
exterior points. To check positioning gross error, the restored polar curve of
relevant adjacent frame's pose is suggested to use. Meanwhile, in the back end, the
incremental nonlinear optimization such as camera's pose has been done to reduce
error accumulation. Experiments prove that the hybrid algorithm has lower
localization accuracy but higher calculation efficiency compared to the current open
source ORB-SLAM2 algorithm.
译
关键词
视觉里程计(VO); 光流; 特征点法; 对极几何; 计算效率
Keywords
visual odometry; optical flow; key point; epipolar geometry; calculation efficiency
译
视觉里程计(visual odometry, VO)及视觉同步定位与建图(visual simultaneous location and
mapping, V-SLAM)技术,弥补了 GNSS 系统在室内、遮挡等环境下精度较低的缺陷
[1]
,是无先
验、陌生环境下定位、定姿的一种有效技术手段, 在无人车、智能机器人、增强现实(augmented
reality)等领域有着广泛的应用。
VO/V-SLAM 算法大致可分为直接法和基于特征点的方法
[2-3]
。直接法假设同一路标点在不同帧的
短时间观测内灰度保持不变,优化相机位姿以使影像光度差最小。文献[4]是直接法的代表性算法。
基于特征点的方法通过匹配物方点、像方点,最小化重投影误差来确定位姿。特征点匹配有两种思
路,一是计算描述子距离,距离最近的特征点一定程度上可认为是对同一地图点的观测;文献[5-7]

剩余10页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4461
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- MessagePack 的 Go 代码生成器 , msgpack.orgGo.zip
- 2023-04-06-项目笔记 - 第三百三十五阶段 - 4.4.2.333全局变量的作用域-333 -2025.12.02
- GTK3 的 Go 绑定.zip
- GTK 的 Go 绑定.zip
- GraphQL 的 Go,Golang 实现.zip
- Go(golang)游戏服务器框架.zip
- ASP.NET C#+JS多文件上传源码
- Go(golang)中的 JavaScript 解释器.zip
- goth 包提供了一种简单、干净且惯用的方式来为 Go Web 应用程序编写身份验证包 .zip
- PHP 中 Cookie 和 Session 的使用简易教程(学习笔记)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


