基于拉普拉斯分布的双目视觉里程计.docx
版权申诉
181 浏览量
2023-02-23
16:49:38
上传
评论
收藏 2.03MB DOCX 举报

视觉里程计(Visual odometry, VO)是在未知环境中只通过相机获得的图像信息来实现
机器人定位的技术. 近些年来, VO 广泛应用于机器人导航
[1]
、无人机
[2-3]
和虚拟现实/增强现
实
[4]
等领域.
视觉里程计使用单目或多目相机作为视觉传感器. 单目相机为主要传感器的 VO 系统
虽然成本较低, 但面临的主要问题是单目尺度的不确定性, 在计算过程中会发生尺度漂移
[5-
6]
. 该问题通常使用多传感器来解决, 例如雷达和多目相机. 相比于单目相机, 双目相机可以
直接测量三维空间点的位置, 避免了尺度的不确定性, 因此本文使用双目相机作为视觉传感
器.
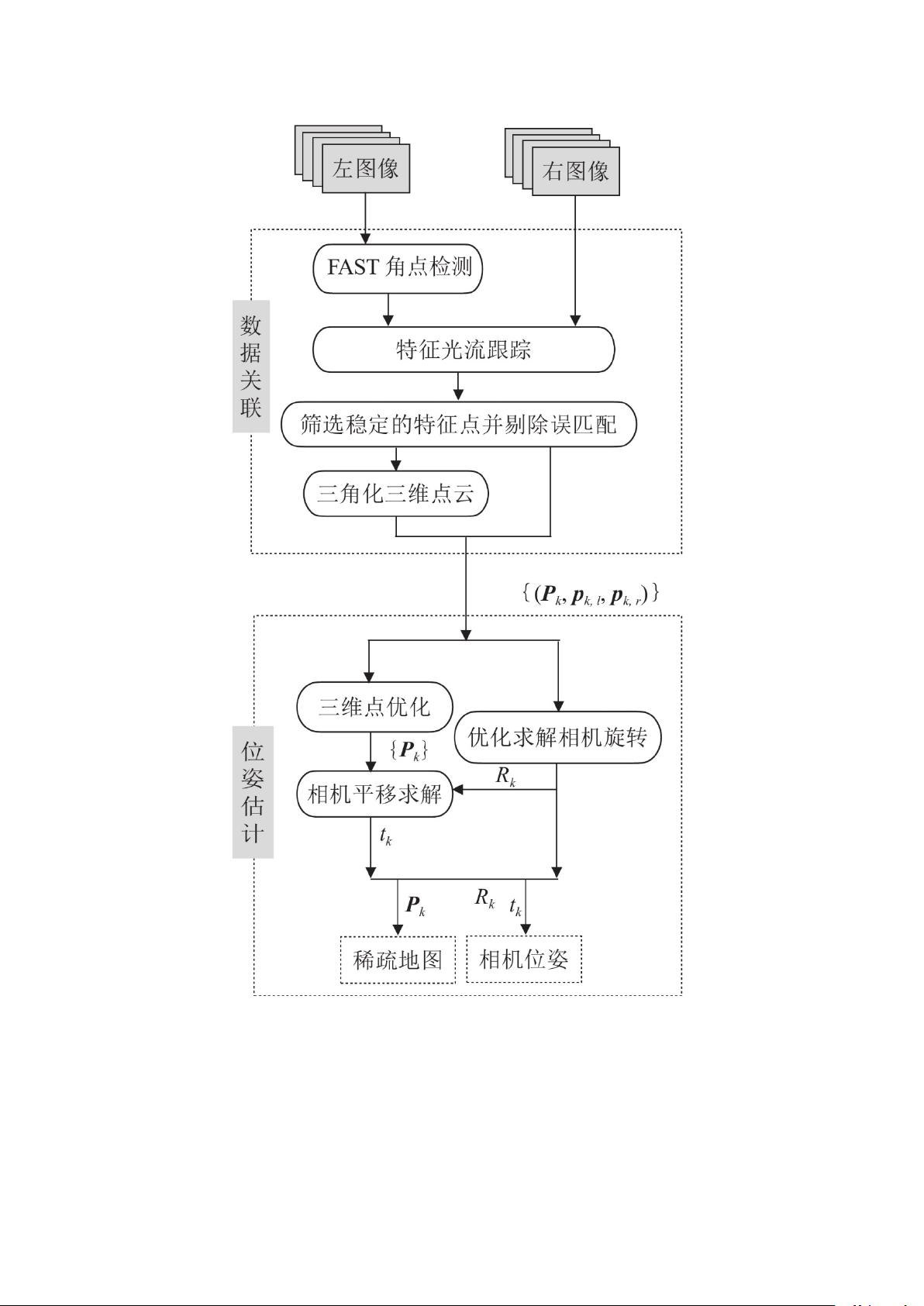
VO 系统分为前端和后端
[7]
. 前端通过特征点匹配构造数据关联来为后端优化提供初始
位姿. 数据关联(Data association)是指在帧与帧之间的特征点、特征点与地图点以及地图点
与地图点之间构建 特征对应关系
[8]
. 数据关联错误是 VO 系统失败的主要原因之一. 基于
图像特征点的 VO 系统数据关联方式主要分为两种. 一种是通过计算特征点的描述子来构
建数据关联. 采用描述子匹配特征点的准确性与鲁棒性较高, 但是特征描述子的计算非常耗
时. Mur-Artal 等
[9]
测试尺度不变特征变换(Scale-invariant feature teansform, SIFT)
[10]
和加速健
壮特征(Speed-up robust feature, SURF)
[11]
提取耗时约为 300 ms, 像这类比较耗时的特征提取
算法会影响 VO 系统的实时性. 为了提高实时性, Mur-Artal 等在 ORB (Oriented fast and
rotated brief)-SLAM (Simultaneous localization and mapping)
[9]
中选择计算速度较快的 ORB 特
征点作为图像特征, 帧与帧之间特征点通过特征描述子匹配. Cvišić 等
[12]
在 SOFT (Stereo
odometry based on feature tracking)中提取 Corner 角点和 Blob 角点同时计算特征描述子, 并
通过在连续帧中追踪同一特征点, 如果该特征能被追踪到则使用初始的描述子来提高数据
关联的精确性. 由于相机帧率和图像分辨率越来越高, 导致特征提取的计算量越来越大, 即
使使用 ORB 这类速度较快的特征描述子也可能会影响 VO 系统的实时性. 另一种方式只提
取角点而不计算描述子, 角点之间的匹配关系通过稀疏的光流(Optical flow)跟踪来构建
[13-14]
.
稀疏的光流算法计算速度快, 但光流容易导致特征点误匹配从而使得数据关联错误, 因此本
文使用光流来构建数据关联的同时采用其他技术尽可能剔除错误的数据关联.
VO 系统的后端优化前端估计的相机初始位姿, 本文在后端只优化相机位姿而不维护
一个全局地图. 在优化过程中目标函数的设计影响着系统鲁棒性. 在经典的 Bundle
adjustment (BA)和扩展的卡尔曼滤波(Extended Kalman filter, EKF)算法中都假设误差服从高
斯分布, 优化过程中对噪声敏感, 因而导致位姿估计的误差较大. 与高斯分布相比, 拉普拉
斯分布对大噪声不敏感. 同时, 对于长尾数据(Long tail data)来说, 拉普拉斯分布比高斯分布
更适合对大幅噪音的似然描述
[15]
, 从而对异常点数据更加鲁棒.
本文在 VO 后端假设误差服从拉普拉斯分布, 进而构造优化问题的目标函数.
Casafranca 等
[16]
在此假设下构造因子图优化问题. Bustos 等
[17]
通过构造旋转的平均只优化相
机朝向, 在相机朝向已知的情况下得到全局最优的相机位置和三维空间点. 该方法优化相机
朝向时不受相机位置与三维空间点的影响因此更简单并且能够处理纯旋转的相机运动, 但
是该方法运算速度慢, 并且在求解相机位置时由于同时优化三维空间点和相机位置, 误差较

剩余19页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3659
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











