基于两台显微相机主动运动的微球孔姿态高精度测量方法.docx
版权申诉
66 浏览量
2023-02-23
20:17:41
上传
评论
收藏 1.87MB DOCX 举报


自 20 世纪 80 年代至今, 微机电系统得到了飞速的发展, 微装配与微操作技术也取得
了较大的进步. 目前, 微装配仍然是一个热点领域, 如何将不同形状不同材质的微小型零件
进行高精密装配, 仍然存在很多需要解决的问题
[1]
. 其中, 微器件姿态的测量在微装配中是
一个非常重要的方面, 是后续的运动控制、姿态调整的基础, 受到研究人员的普遍重视. 目
前, 已有大量关于姿态测量的文献. 例如, 文献[2]利用立体视觉测量了超音速风洞中滚动目
标的位姿, 通过删除不匹配点, 提高了测量精度. 文献[3]提出了一种利用两台机器人的机载
相机估计目标位置的方法, 利用两台相机图像中目标的匹配特征点计算目标的 3D 位置, 相
当于立体视觉. 针对非基准复杂零件的位姿测量问题, 文献[4]中提出了一种基于迭代优化
的视觉测量方法, 不需要特征提取, 具有较高的测量精度, 但每次测量耗时近 20 s. 文献[5]
提出了一种基于卷积神经网络的端到端的位姿测量方法, 实现了棋盘格目标的位姿测量. 文
献[6]设计了基于三轴陀螺仪、三轴加速度计和三轴磁强计的姿态测量系统, 通过多传感器
数据融合求取无人机姿态, 并将加速度计信任度引入基于四元数的互补滤波算法, 增加了无
人机姿态测量的精度. 文献[7]提出了一种融合 RGB 和深度传感器信息的姿态估计方法, 提
高了姿态估计对尺寸、光照和噪声的鲁棒性, 提高了复杂场景中方形基准标记的姿态估计
精度. 文献[8]中提出了一种基于单位四元数的立体视觉初始姿态估计方法, 并对姿态估计
精度进行了预测和分析. 通过对机器人姿态的旋转和平移的相关分析, 分离出旋转协方差和
平移协方差, 有效地实现协方差估计, 实现了姿态的精确估计. 文献[9]提出了一种基于 3D
激光雷达和立体视觉信息融合的非合作目标姿态测量及运动估计方法, 实现了对空间非合
作目标姿态的高精度测量.
上述姿态估计皆可实现对目标姿态的准确测量, 但皆属于宏观测量, 且其中有些测量
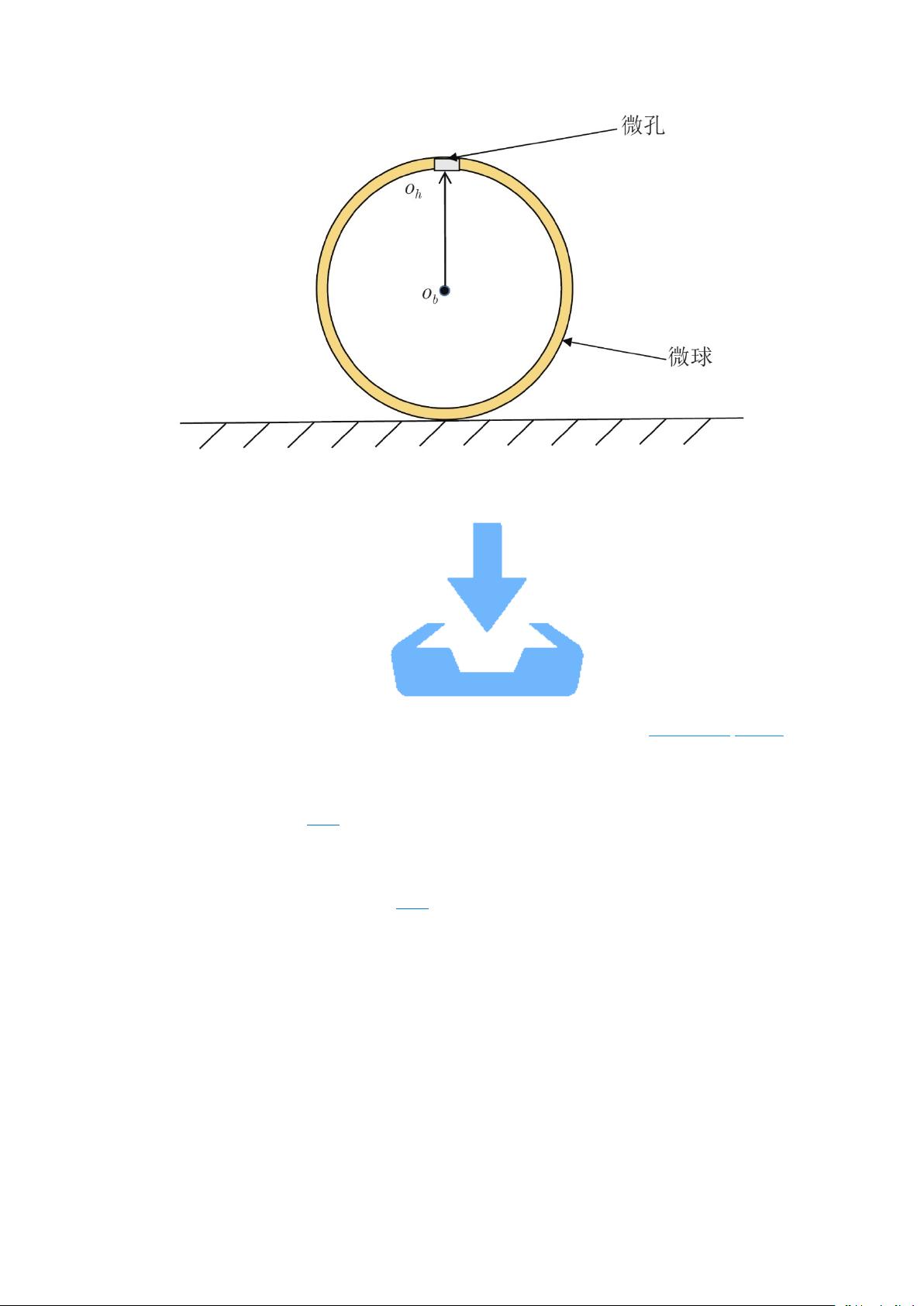
方法需要多种传感器, 通过信息融合提高姿态测量的精度. 在微装配中, 由于显微视觉视野
小景深小, 操作空间小, 不同的显微相机几乎没有公共视野, 故上述姿态测量方法不适用于
微装配. 为此, 研究人员提出了一些基于显微视觉的目标姿态测量的方法. 文献[10]提出了
一种基于 Hough 变换和模板匹配的目标定位和姿态检测方法. 该方法能精确定位目标并获
得其倾斜角度. 文献[11]提出了一种基于单目显微视觉系统的平面位姿估计算法, 用于基于
视觉引导下的微零件加工. 利用基于 PnP (Perspective-n-point)算法的线性方法估计姿态的初
始值, 然后利用正交迭代算法对姿态进行优化, 可保证姿态矩阵的单位正交性. 文献[12]提
出了基于双目视觉检测针状目标姿态的方法, 提取针状目标特征点, 标定空间三维坐标系与
二维图像之间的转换矩阵, 得到目标中轴线上一系列点的三维坐标, 采用最小二乘法拟合直
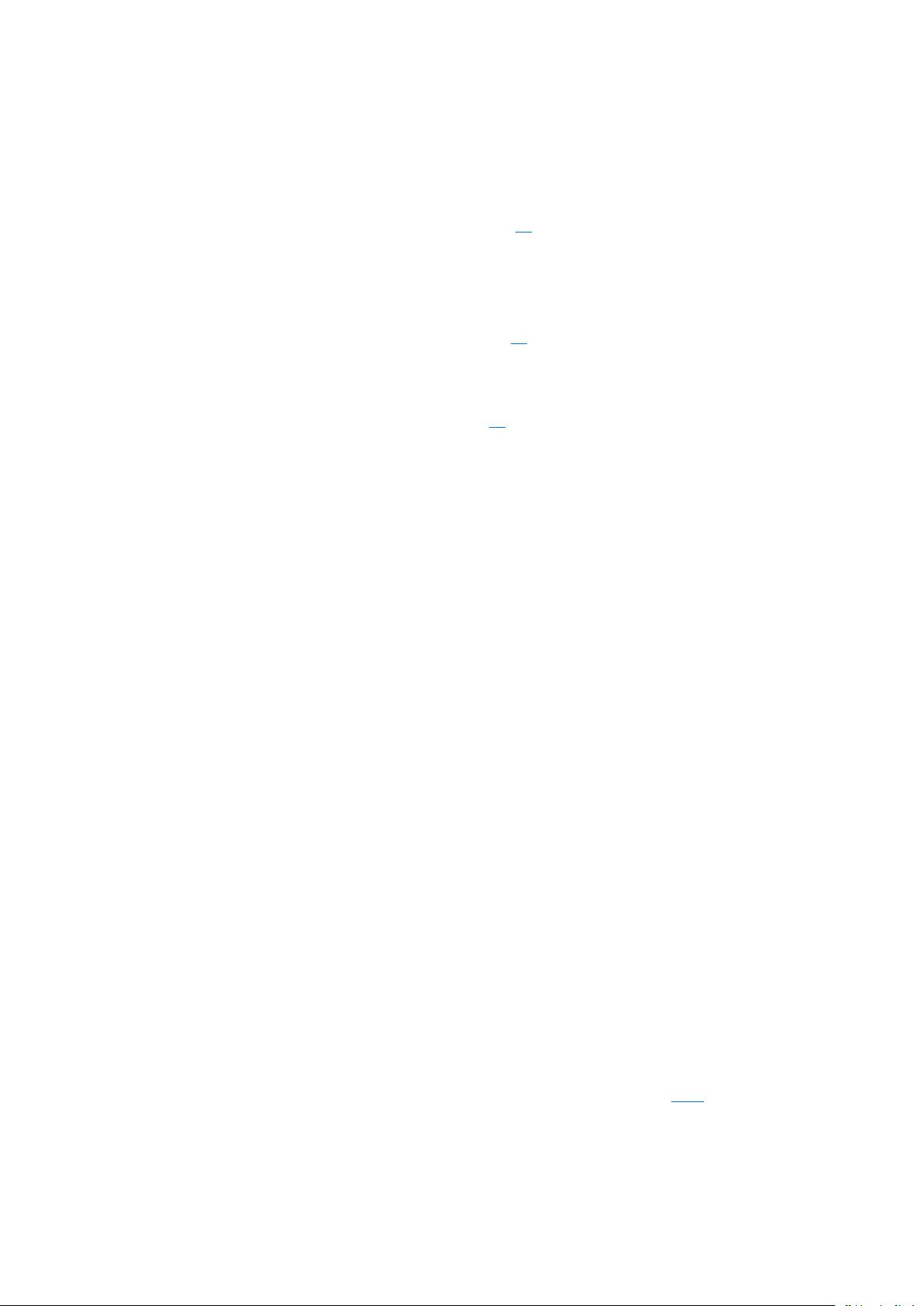
线, 得出针状目标的姿态向量, 测量误差为±±0.3°. 文献[13]提出了一种基于三路显微视觉
系统的微小零件在线检测与装配策略, 提出了基于图像特征的微零件相对位姿测量算法, 实
现了复杂的微小零件装配. 文献[14]提出了一种利用单台显微相机测量凸台零件姿态的方
法, 利用凸台的阴影估计零件的姿态, 方向向量均方根误差约 0.2°. 文献[15]提出了一种基
于显微视觉的微胶接自动装配方法, 利用点特征测量两个器件之间的相对位置偏差, 采用视
觉伺服完成微装配任务. 文献[16]提出了一种基于支持向量机的微器件识别方法, 利用
Broyden 方法在线估计表征位置偏差的图像雅可比矩阵, 实现了基于显微视觉的微器件识
别、定位和抓取. 文献[17]提出了一种基于轮廓基元的微器件体征提取方法, 基于模板匹配
实现轮廓基元与微器件图像的对准, 从而准确提取出图像特征. 对于 3 台显微相机构成的视
剩余24页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3551
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











