结合头部和整体信息的多特征融合行人检测.docx
版权申诉
152 浏览量
2023-02-23
20:06:39
上传
评论
收藏 539KB DOCX 举报


1. 引言
行人检测与行人重识别技术、目标跟踪技术等相结合在自动驾驶、视频监控等领域中
有广泛的应用
[1-4]
。然而实际检测中行人容易产生遮挡、重叠等问题,并且行人距离的远近
会导致行人尺度产生较大变化,这些问题严重影响了行人检测的准确率
[5]
。
目前卷积神经网络广泛应用于行人检测,其中以 Faster R-CNN
[6]
为代表的两阶段检测
器和以 RetinaNet
[7]
为代表的单阶段检测器取得了较好的效果。李春伟等人
[8]
采用多个卷积
层的输出进行检测从而降低尺度造成的影响;Lin 等人
[9]
提出特征金字塔的概念并构建了
FPN (Feature Pyramid Network),该方法逐渐成为解决尺度变化问题的主要手段
[10,11]
。针对
行人检测中的遮挡问题,Zhang 等人
[12]
提出聚合损失函数使候选框靠近真实边界框以此降
低类内遮挡造成的影响;Du 等人
[13]
通过在网络中添加额外的行人特征掩模减少背景像素的
干扰;Fei 等人
[14]
通过引入更丰富的上下文信息减少遮挡造成的干扰;Liu 等人
[15]
考虑行人
的标注方式,使用预测目标中心点及尺度的方式有效提升了检测准确性,同时该方法可有
效减少类内遮挡造成的漏检。Liu 等人
[16]
通过添加密集程度检测模块为非极大值抑制提供
更合理的筛选条件,有效提升了密集场景下行人检测的准确性。综上所述,上述方法从多
个角度入手解决目标遮挡与尺度过小造成的检测准确性降低的问题,但却忽视了一个重要
的方面,即行人的头部往往不易产生类内遮挡,即使躯干部分由于部分遮挡而无法被检
测,但此时行人的头部特征依然明显,而该信息对于行人而言尤为重要,如 Xu 等人
[17]
便
利用头部信息提升行人跟踪的准确性。此外,大多数方法仅使用主干网络最后 3 层卷积层
的输出进行特征融合,而小尺度目标往往在卷积层的较浅层拥有较高激活程度。
针对以上问题,本文构建了一种结合头部和整体信息的行人检测模型。受文献[18]的
启发在行人检测的基础上添加行人头部检测分支,并利用 CrowdHuman
[19]
数据集自带的行
人头部标签对模型进行训练;考虑到使用矩形边界框标注行人会引入大量背景像素,因此
本文参照文献[15]采用中心点对行人头部和整体进行标注;两个检测分支采用不同深度卷
积层的输出进行特征融合,从而提供有针对性的特征信息;同时,本文对非极大值抑制算
法进行改进,通过添加行人头部的相关判断条件,使行人头部信息和行人整体信息能较好
的结合。
2. 算法原理设计
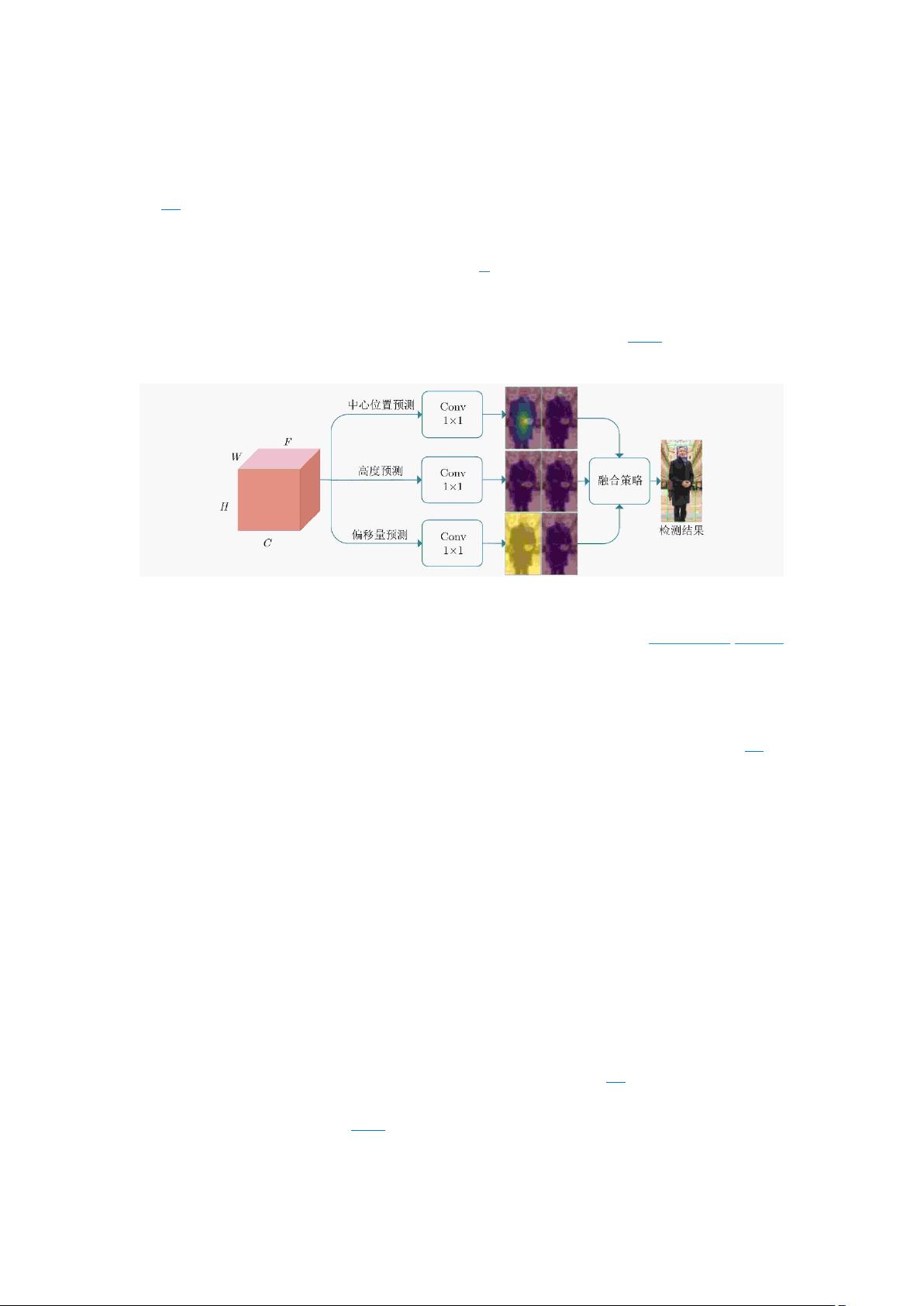
图 1 为本文提出的网络模型结构,该模型由特征提取模块及检测模块组成。特征提取
模块除主干网络外还包含 5 层结构的特征金字塔。对于行人头部和整体,使用该特征金字

剩余11页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3651
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











