多传感器信息融合的前方车辆检测.docx
版权申诉
173 浏览量
2023-02-23
16:46:11
上传
评论
收藏 309KB DOCX 举报


0. 引 言
随着汽车技术的不断发展,智能辅助驾驶系统(Advanced Assisted Driving System,
ADAS)开始被广泛应用于车辆的安全系统中,用以提升车辆的安全性。在遭遇危险驾驶
场景时,它可以提前为驾驶员进行安全信息预判,具有保证车辆行驶安全,降低交通事故
的优点,目前已成为汽车产品开发的热点
[1]
。
车辆在行驶过程中,辅助驾驶系统可以实时对行驶环境进行监测,识别出可能存在危
险的目标信息。传感器对于目标的感知能力起着至关重要的作用,只有实现了目标车辆的
精确感知才能实现精确预警与决策
[2]
。为提升辅助系统对于环境的感知能力,国内外学者
做了大量的研究工作。Song W 等
[3]
对摄像头和雷达进行了信息融合,目标的横向信息采用
摄像头的数据,纵向信息选用雷达数据,同时结合车辆运动模型对目标的危险性进行判
别,以提升对前方危险目标的探测能力;Natnael S 等
[4]
对单目标和多目标识别算法进行了
研究,采用了机器学习算法对目标进行检测与追踪,目标距离的输出依据于雷达数据信
息,提升了对目标车辆的检测能力;郭磊等
[5]
提出了非线性映射能力直接建立了毫米波雷
达坐标系和视觉图像坐标系之间的映射关系,提升了毫米波雷达与视觉传感器联合标定的
精度,也缩短了标定时间。顾恭等
[6]
对深度学习算法进行了改进,扩充学习样本数量,调
整了图像输入参数,优化了网络的特征提取,提升了算法对于目标车辆的探测能力。
在目标的识别与分类检测上,摄像头作为驾驶系统的重要传感器,可以捕获丰富的图
像信息,但传统基于特征和颜色的检测算法,对目标车辆的检测精度较低,鲁棒性较差。
深度学习算法进行对车辆特征图像的学习训练之后,可对目标车辆进行快速检测,但在对
远处小目标进行识别时,由于图像特征相对较模糊,识别精度较低,同时对于类似车辆特
征的围栏和铁门,也会出现一定的误检率。通过不断扩充训练样本的数量和标注负样本的
方法,虽然可以提升算法对小目标的识别精度和降低误检率,但是该方法工作量较大且具
有一定的盲目性。由于雷达易受噪声信号的影响,在将摄像头与毫米波雷达进行数据融合
时,需要对其噪声进行过滤,并设定合适的阈值筛选出有效目标,否则具有较多信息冗
余,这方面工作前人较少提及,因此,为了实现辅助驾驶系统对车辆的精确感知,文中选
用了长焦和短焦两种摄像头对前方图像进行采集,借助图像融合的技术来提升图像的清晰
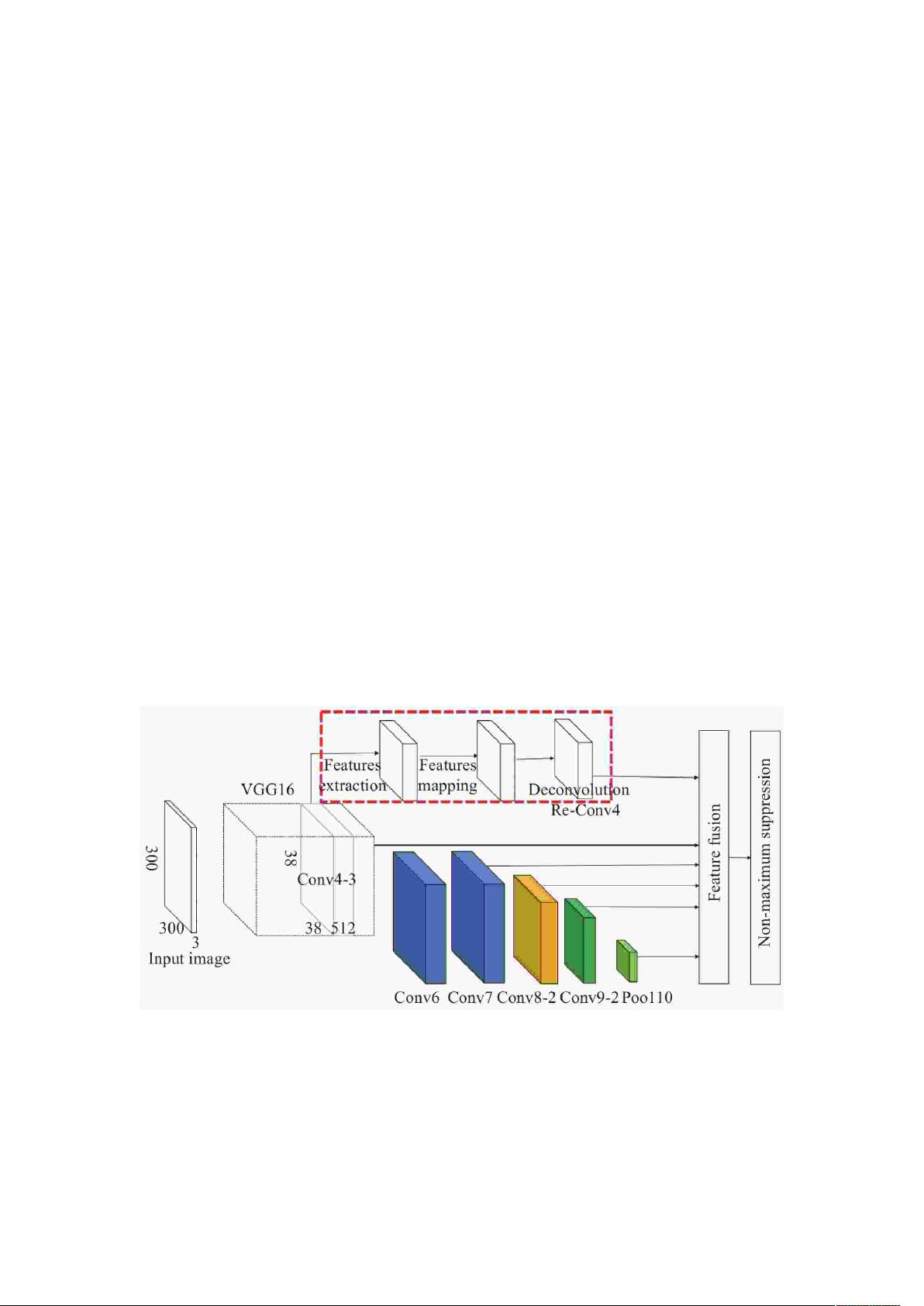
度,并对深度学习算法 SSD 算法进行改进,以提升对远处小目标车辆的识别,同时对毫米
波雷达数据进行处理,借助于雷达模拟器确定出雷达目标筛选的合适阈值参数,提取出有
效的目标信息,通过雷达数据生成目标的感兴趣区域,由 SSD 算法对感兴趣区域进行车辆
检测,消除了雷达的误检测,同时也缩小了图像检测范围,减少图像识别的误检区域,从
两方面对于车辆检测的准确性进行了提升。
1. 机器视觉车辆检测算法
剩余14页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3907
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











