基于非线性干扰观测器的飞机全电刹车系统滑模控制设计.docx
版权申诉
27 浏览量
2023-02-23
16:53:53
上传
评论
收藏 1.33MB DOCX 举报


防滑刹车控制是飞机地面滑跑安全系统设计中的关键性难题之一, 随着现代飞机性能
大幅度提升, 对刹车系统安全和刹车效率等提出了更严格的要求, 其性能品质与提供刹车力
矩的动力源有着密不可分的关联. 但是基于传统液压的传统飞机刹车系统弊端日益凸显, 如
较长的液压管道存在油液泄露危险, 机械结构体积大、维护成本高等
[1]
. 基于机电作动器
(Electro mechanical actuator, EMA)
[2]
的全电刹车系统, 将减速齿轮、滚珠丝杠、无刷直流电
机、电磁制动器和检测装置集成化, 具有安全系数高、可靠性强、体积小、质量轻、动态
性能好、易维护、机内自检测等优势, 已经成为未来飞机刹车系统新的发展方向
[3-5]
.
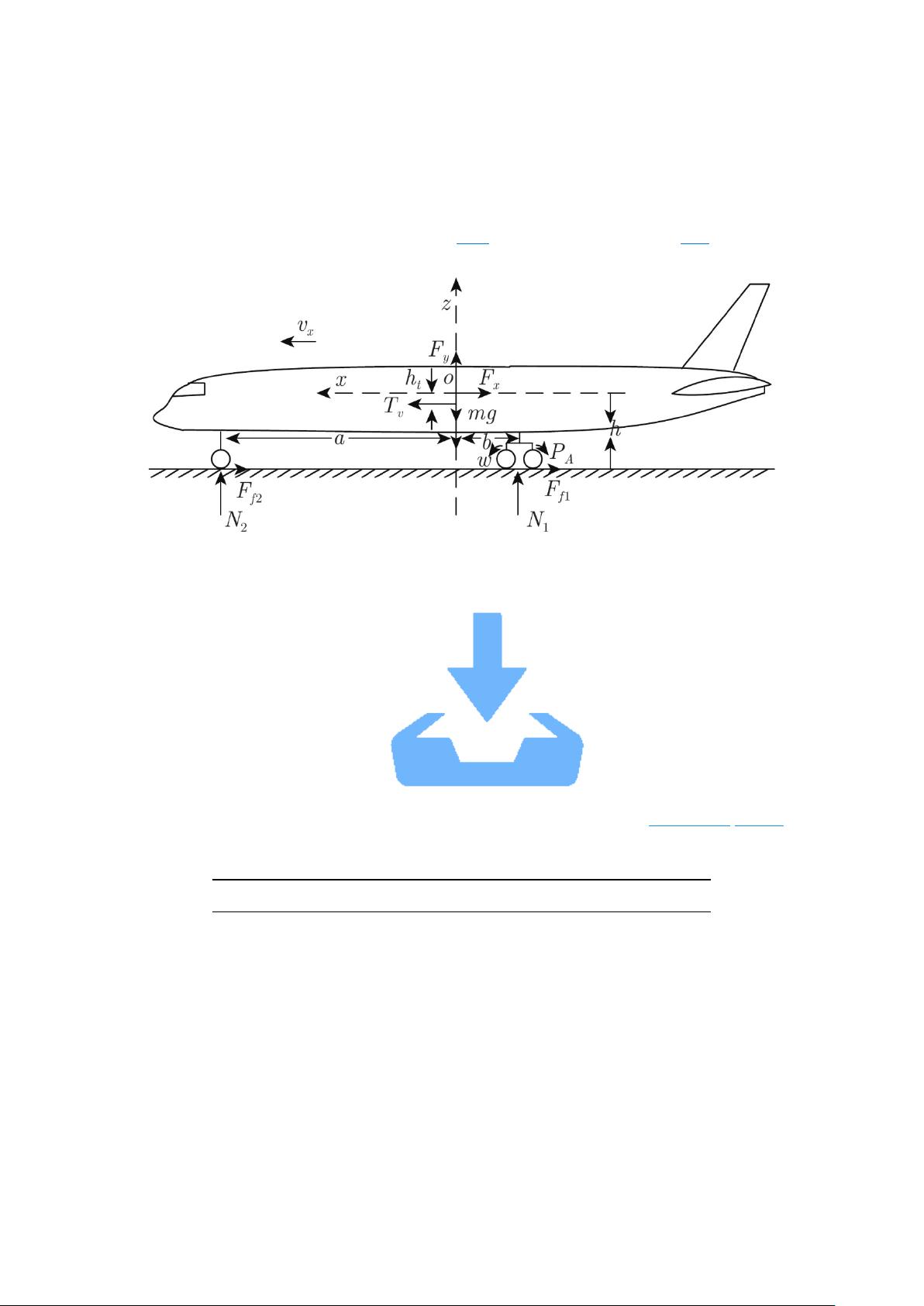
在整个刹车过程中受到多时变参数、垂直与纵向力矩耦合机理以及飞机动力学模型呈
现高度非线性特征等因素的影响, 使得建立精确的飞机防滑刹车系统模型是十分困难的. 文
献[6-7]中针对飞机防滑刹车动力学模型, 仅考虑了纵向力矩, 并假设前轮与主轮摩擦系数相
同或直接忽略了前轮摩擦力. 然而, 飞机防滑刹车系统模型仍需要考虑纵向与垂直方向力矩
耦合情况, 前轮始终自由滚动, 属于动摩擦系数, 主轮由 EMA 产生刹车力矩, 属于静摩擦
系数, 两者本质上是不同的. 同时, 前轮承担约 10 % ~ 15 %的垂直载荷, 其摩擦力不应忽
视. 值得注意的是, 现有理论方法并未充分考虑 EMA 内部结构的数学模型与飞机刹车动力
学模型之间的关系. 为克服上述局限性, 本文建立了一种更适合实际应用的综合飞机防滑刹
车系统模型. 另一方面, 飞机防滑刹车系统性能容易受到跑道表面状况(干燥、潮湿或结冰
等)、刹车动静盘摩擦面不均匀、空气阻力、全电刹车作动器内部结构等诸多干扰因素的影
响, 对整个刹车控制设计与优化带来巨大挑战
[8]
. 近年来, 针对飞机防滑刹车系统的抗干扰
控制设计研究取得了一系列进展, 例如: 文献[9]为了提高 EMA 中伺服控制效果, 采用自适
应径向基函数(Radial basis function, RBF)神经网络对系统的复合外部干扰上界预估, 并将干
扰估计值作为控制器补偿项, 很大程度上提高了刹车控制的鲁棒性. 文献[10-11]对 EMA 中
减速齿轮变形、开关磁阻电机的非线性干扰分别采用了 RBF 神经网络和误差反向传播神经
网络进行逼近, 预估的非线性函数曲线与实际干扰的误差较小. 基于神经网络干扰估计的方
法需要事先在离线状态下训练模型, 但干扰具有复杂性、时变性, 难以获取精确数据作为训
练集, 因此在线观测的效果欠佳. 文献[12]根据控制系统的响应, 归纳不同类型的扰动, 对
刹车系统信号进行统计分析, 提取出对干扰最敏感的特征变量. 同时, 利用概率理论, 提出
了基于数据预处理、连续隐马尔科夫分类器和贝叶斯滤波器的飞机防滑刹车干扰识别与观
测模型. 该方法需要大量的实验数据支持. 但在实时刹车过程中对干扰的精确估计是非常困
难的. 本文提出了基于模型改进的非线性干扰观测器方法, 无需大量数据且具有对高阶微分
干扰的观测能力, 引入了控制器的干扰补偿部分, 起到干扰抑制的作用.
飞机防滑刹车系统主要采用滑移率控制方式, 通过控制滑移率, 使得主轮与地面之间
的静摩擦系数保持最大值, 获得最大的刹车力矩. 在过去的几十年里, 一批学者和工程师提
出的控制算法在飞机刹车领域得到了广泛的应用, 例如动态面控制
[13]
、自适应控制
[14]
、切
换控制
[15]
、模糊逻辑控制
[16]
、模型预测控制
[17]
、滑模控制
[18]
、极值搜索控制
[19]
等. 考虑到飞
机速度、加速度等变量无法准确测量, 文献[20]基于卡尔曼滤波器对飞机速度、地面−轮胎
结合力进行估计, 利用 RBF 神经网络对气动扰动进行观测和补偿, 根据能量消耗估计制动
盘摩擦系数的变化规律, 结合跑道辨识技术形成高效的防滑刹车控制策略. 文献[21]提出了


剩余20页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3551
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 基于串口通信的光通信上位机,包括运动控制和通信协议
- 串口与以太网文件传送协议(或自定义控制协议)
- Qt开发windows系统安装教程与代码实例.txt
- QT6实现的附带文件传输协议的串口终端
- 一个串口通讯类和调用Demo 通过设置串口、设置串口自定义协议,可方便对串口发送数据与接收数据
- 华为OD模拟题及参考答案.仅供学习和模拟考试使用
- stm32f103c8t6基于modbus协议和使用串口读取温湿度
- 英雄联盟LOL金克斯4K电脑壁纸
- Microbrain道闸产品上位机,以MahApps库为基础搭建界面,集成了串口(UART)、CAN、WIFI通信,十六进制协议
- Android串口通讯, 支持发送数据回调, 支持并发处理, 自定义协议, CRC校验, 自动粘包, 自动去除冗余的干扰数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


