无人机三维路径规划及避障方法.docx
版权申诉
168 浏览量
2022-11-04
16:46:34
上传
评论
收藏 779KB DOCX 举报


0 引言
近几年,由于无人机(UAV)体积小、运动速度快、代价低,在电力巡线中的应用越来越多. 无人机
进行电力巡线时在满足约束的条件下如何由起点到任务点,避开障碍成为现阶段无人机巡线应用中比较重
要的问题之一
[1]
.
UAV 路径规划是指在考虑地形、环境等因素的前提下,根据 UAV 的能耗、速度、体型设计出满足
UAV 最优性能的路径. 文[2]中,考虑山峰的密集度,根据山峰位置建立泰森多边形,提出一种基于改进
蚁群算法的 UAV 路径规划方法,可为 UAV 规划出较短路径,但是该方法未考虑出现动态障碍物的情况.
文[3]中,通过设计多层扩展 A
*
算法,提出了一种在复杂环境下无人机的路径规划方法,可在考虑路径平
滑性的前提下快速规划出一条路径,但该方法规划时间较长;文[4]中,提出一种通过生物神经动力学模型
来解决 UAV 三维空间的路径规划问题,并能解决 UAV 的实时避障问题,但该方法不能达到全局最优. 关
于路径规划算法,现在主要有蚁群算法、神经网络算法、粒子群算法以及一些改进的智能算法
[5-7]
. 传统算
法虽然对目标及约束定义明确,但是收敛速度慢、容易陷入局部,其借鉴意义不大. 由于粒子群算法速度
快,易于实现,因此在路径规划中受到广泛应用. 文[8]中,在粒子群算法中引入自然选择系数和惯性权
重,极大地提高了粒子群算法的收敛性,解决了算法易陷入局部最优的问题,同时缩短了路径长度. 文[9]
中,通过交叉变异、惯性调节参数并用元矩阵定义离散粒子的方式来使粒子保持多样性,解决了自主水下
航行器的侦察问题. 文[10]中,提出了一种改进的粒子群算法,该算法由随机期望值决定速度更新模型,
通过在速度更新方程中增加随机时滞,避免粒子群算法陷入局部.
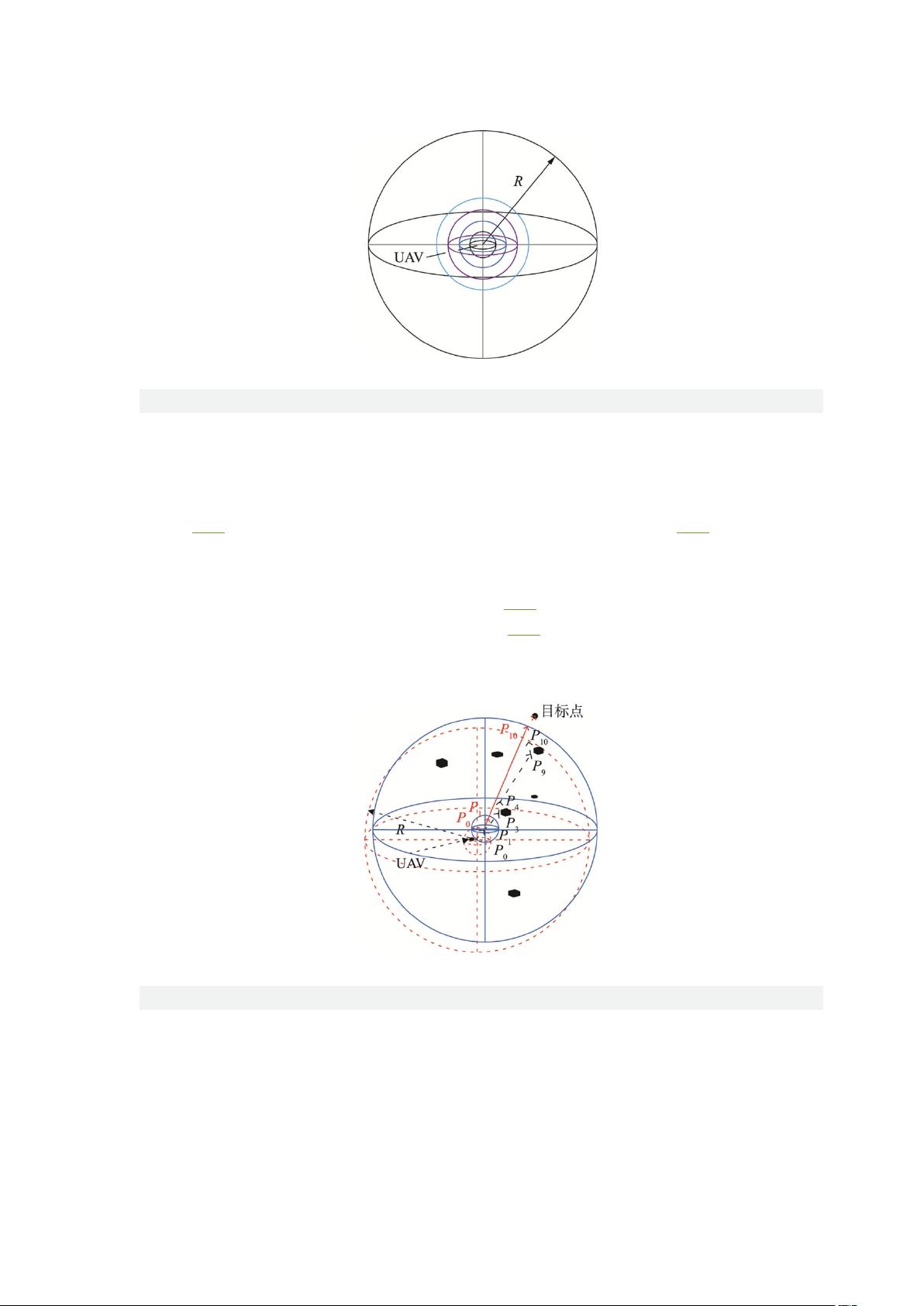
综合上述分析,本文提出一种基于改进粒子群算法与滚动策略相结合的 UAV 路径规划与避障方法.
该方法由传感器半径 R 为边界,UAV 中心为球心,建立 10 个等间距的同心球体,结合滚动策略实时探知
UAV 周围环境,通过改进的粒子群算法为 UAV 规划路径,解决了以往路径规划不能在动态环境中应用的
问题. 通过该方法可以使 UAV 快速准确地探知到其周围的环境信息并可避免随机产生的威胁,为 UAV 的
路径规划提供准确的环境信息;在算法中引入信息素,通过为每个粒子加载信息素提高算法的收敛速度,
通过加入启发函数增强粒子对下一目标点选择的目的性提高全局搜索能力,算法参数的选择对于粒子群算
法的性能起到重要的作用
[11]
,本文通过对参数分析、计算选出了最优的参数.
1 UAV 三维空间模型
UAV 装有传感器探知周围的环境信息,传感器的探知半径为 R. 在 UAV 工作的三维环境中,以
UAV 的中点为球心等间距地分布着 10 个三维球体模型,如图 1 所示. 与 UAV 相邻的同心球体上存在
UAV 下一飞行的子目标点. UAV 通过滚动的方式对比个体最短子路径和最优综合转向角来规划最优路径.

剩余10页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3663
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











