
Ubuntu中安装ROS
1、添加ROS软件源
将以下命令复制到ubuntu的终端执行
sudo sh -c 'echo "debhttp://packages.ros.org/ros/ubuntu
$(lsb_release -sc) main" >/etc/apt/sources.list.d/ros-latest.list'
纯文本
或者用下面这条命令(据说这条命令可以提高下载速度)
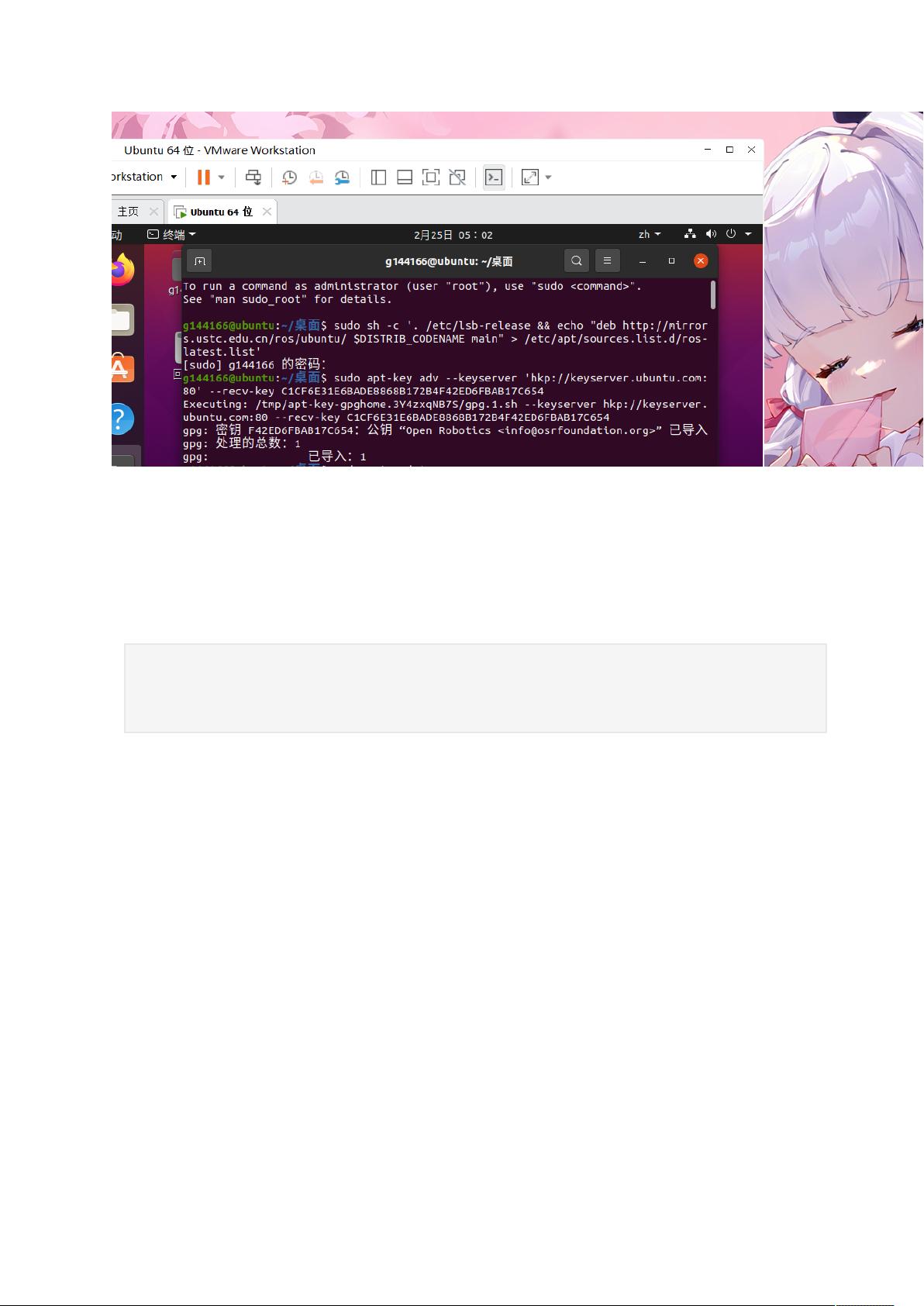
sudo sh -c '. /etc/lsb-release &&echo "deb
http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAMEmain" >
/etc/apt/sources.list.d/ros-latest.list'
纯文本
2、添加密钥
将以下命令复制到ubuntu的终端执行
sudo apt-key adv --keyserver'hkp://keyserver.ubuntu.com:80' --recv-
keyC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
纯文本
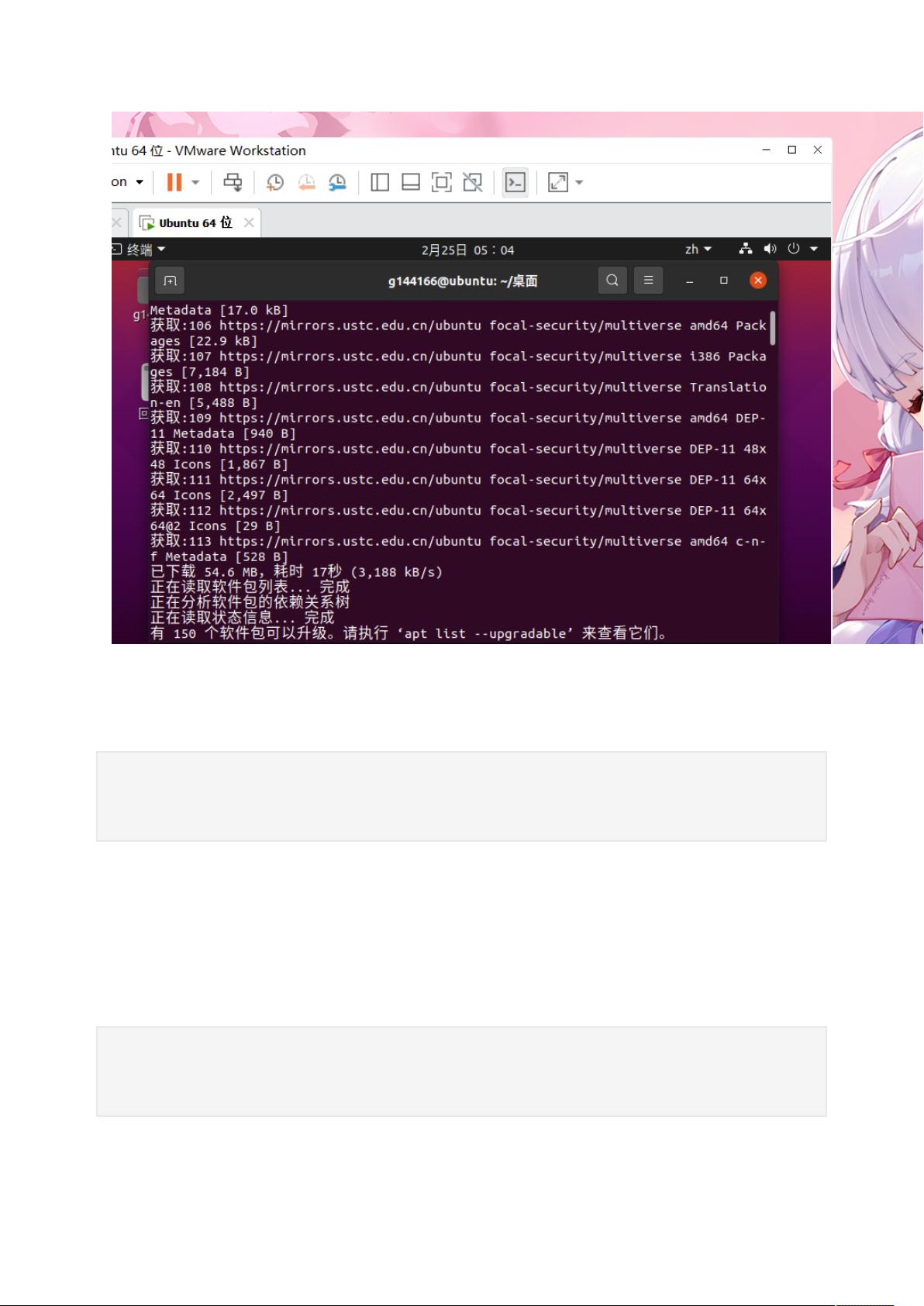
成功后会显示如下界面:
剩余16页未读,继续阅读
资源评论













