

FANUC 机器人 PROFINET I/O 通讯设置
摘要 本文以 CP1616 为例,介绍了 FANUC 机器人使用 PROFINET 通讯作为 Controller 和 Device 的相关设置。
关键词 PROFINET、S7-300、CP1616、ET200S、通讯、硬件组态、I/O 配置。
目录
FANUC 机器人 PROFINET I/O 通讯设置 ..................................................................................................................................... 1
PROFINET I/O 电气部分相关设置 .............................................................................................................................................. 2
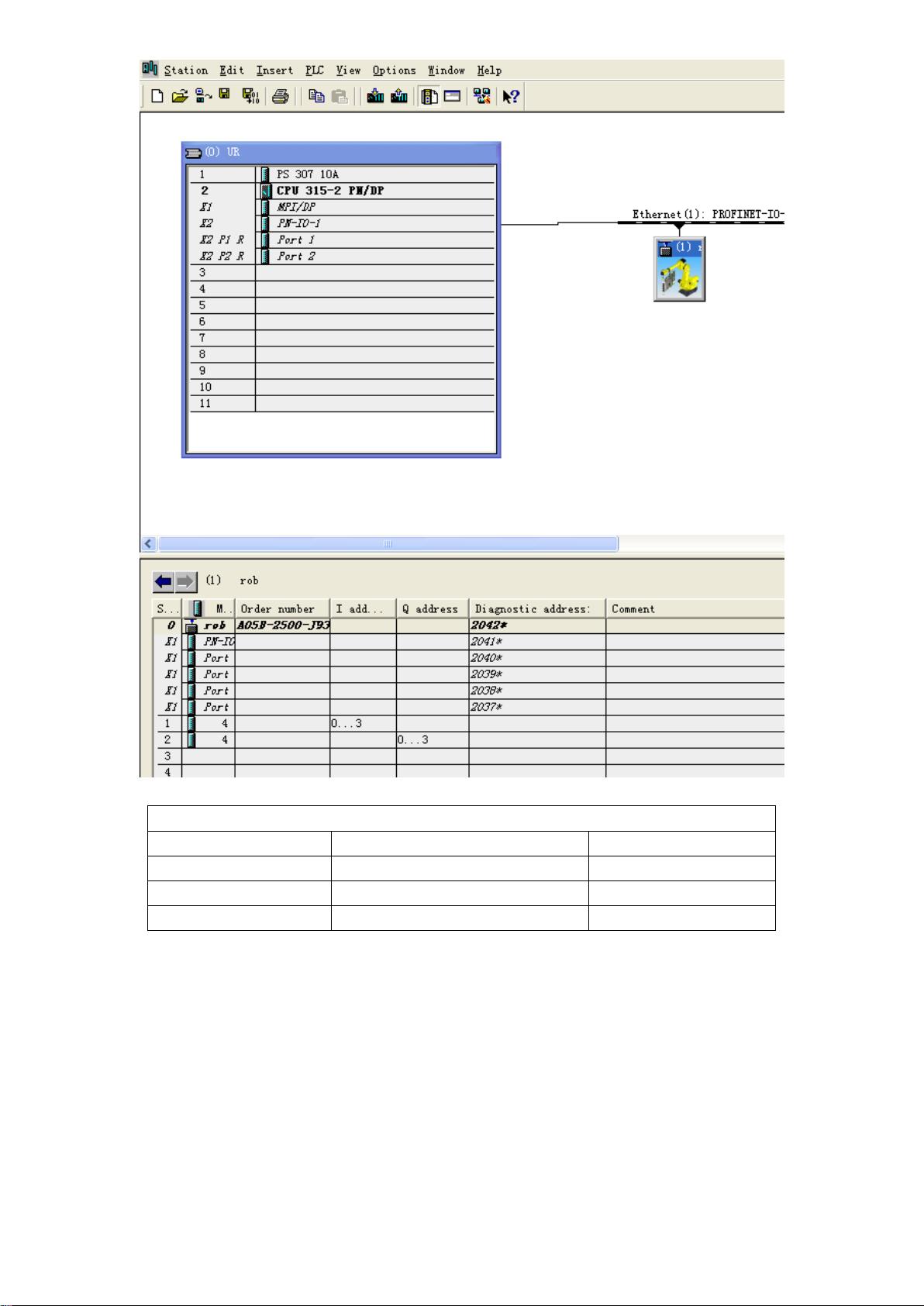
一、 S7-300 作为 CONTROLLER,FANUC 机器人(CP1616)作为 DEVICE ............................................................................................ 2
1.1 硬件 ................................................................................................................................................................................................. 2
1.2 使用软件 .......................................................................................................................................................................................... 2
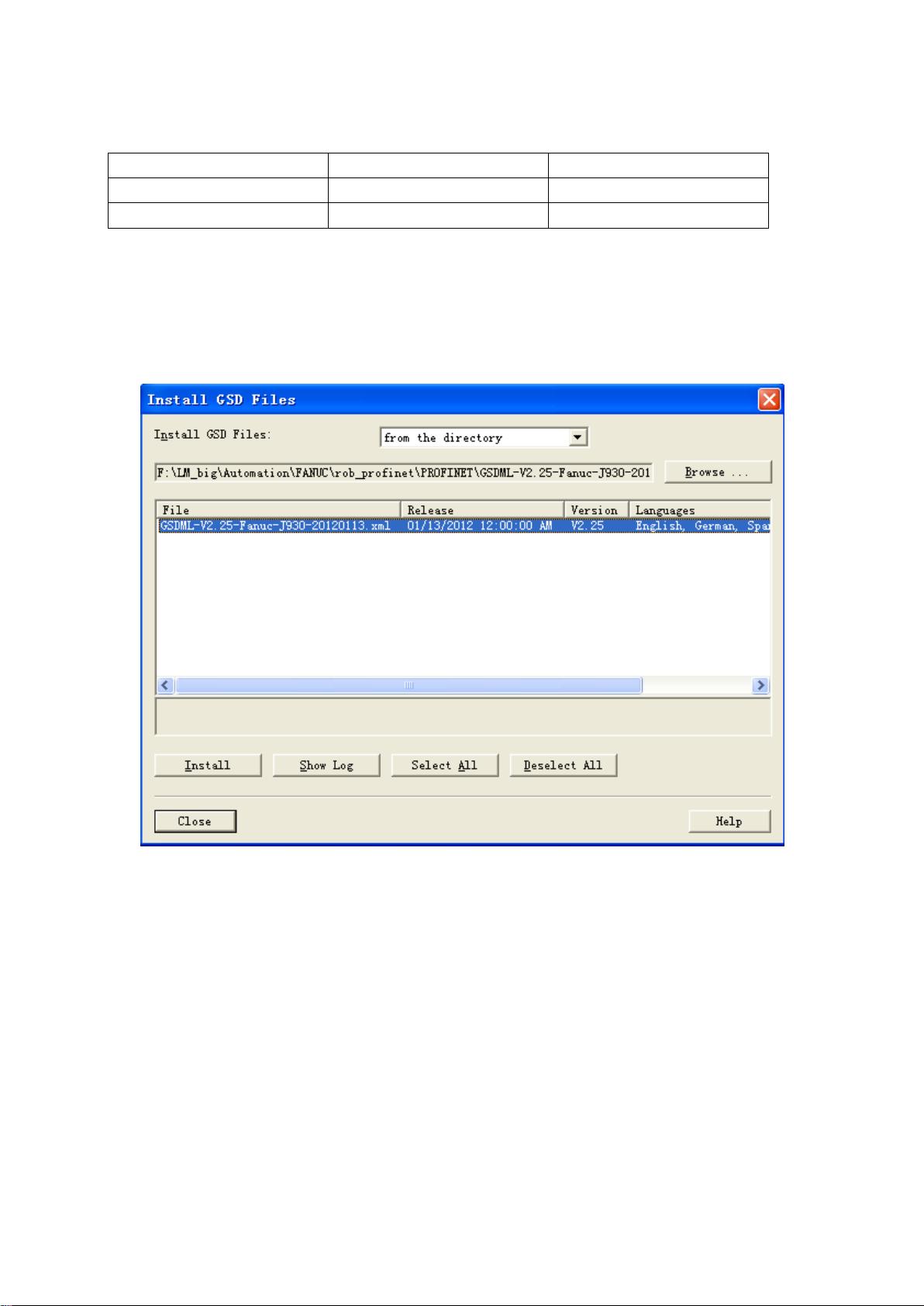
1.3 硬件组态 .......................................................................................................................................................................................... 2
二、 FANUC 机器人(CP1616)作为 CONTROLLER,ET200S 作为 DEVICE ............................................................................................ 4
2.1 硬件:.............................................................................................................................................................................................. 4
2.2 使用软件 .......................................................................................................................................................................................... 4
2.3 硬件组态 .......................................................................................................................................................................................... 4
三、 机器人同时作为 Controller 及 Device .............................................................................................................................................. 6
3.1 分别对 Device 及 Controller 进行配置 ........................................................................................................................................... 6
3.2 配置 INTERNAL PROFINET SLAVE。 ................................................................................................................................................. 6
附录 PROFINET I/O 机器人相关设置 ...................................................................................................................................... 8
附 一、 PROFINET I/O 相关板卡安装 ....................................................................................................................................... 8
1
、
1 CP1616
板卡安装
.......................................................................................................................................................... 8
附 二、 PROFINET I/O 设置界面释义 ....................................................................................................................................... 8
2
、
1 General
界面
.................................................................................................................................................................. 8
2
、
2 I/O Controller
界面
........................................................................................................................................................ 9
2
、
3 I/O Device
界面
.............................................................................................................................................................. 9
2
、
4 I/O Controller
:
Config list
界面
................................................................................................................................... 11
附 三、 机器人作为 DEVICE 设置: .................................................................................................................................... 12
3
、
1
机器人仅作为
Device
时
“
设备接入点模块
”
设置
.................................................................................................. 12
3
、
2
机器人作为
Device
和
Controller
时
“
设备接入点模块
”
设置
................................................................................ 13
3
、
3
机器人作为
Device
时
“
可用模块”的设置
............................................................................................................ 14
3
、
4
机器人作为
Device
时
I/O
配置
.............................................................................................................................. 16
附 四、 机器人仅作为 CONTROLLER 设置: ........................................................................................................................... 16
4
、
1
机器人作为
Controller
时
I/O config list
设置
........................................................................................................ 16
4
、
2
机器人作为
Controller
时
I/O
配置
....................................................................................................................... 18
剩余18页未读,继续阅读

RB_TANG
- 粉丝: 9
- 资源: 32









最新资源
- 基于Vue和SpringBoot的企业员工管理系统2.0版本设计源码
- 【C++初级程序设计·配套源码】第2期-基本数据类型
- 基于Java和Vue的kopsoftKANBAN车间电子看板设计源码
- 影驰战将PS3111 东芝芯片TT18G23AIN开卡成功分享,图片里面画线的选项很重要
- 【C++初级程序设计·配套源码】第1期-语法基础
- 基于JavaScript、CSS、HTML的简易DOM版飞机游戏设计源码
- 基于Java开发的日程管理FlexTime应用设计源码
- SM2258XT-BGA144-4BGA180-6L-R1019 三星KLUCG4J1CB B0B1颗粒开盘工具 , EC, 3A, 94, 43, A4, CA 七彩虹SL300这个固件有用
- GJB 5236-2004 军用软件质量度量
- 30天开发操作系统 第 8 天 - 鼠标控制与切换32模式
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论12