
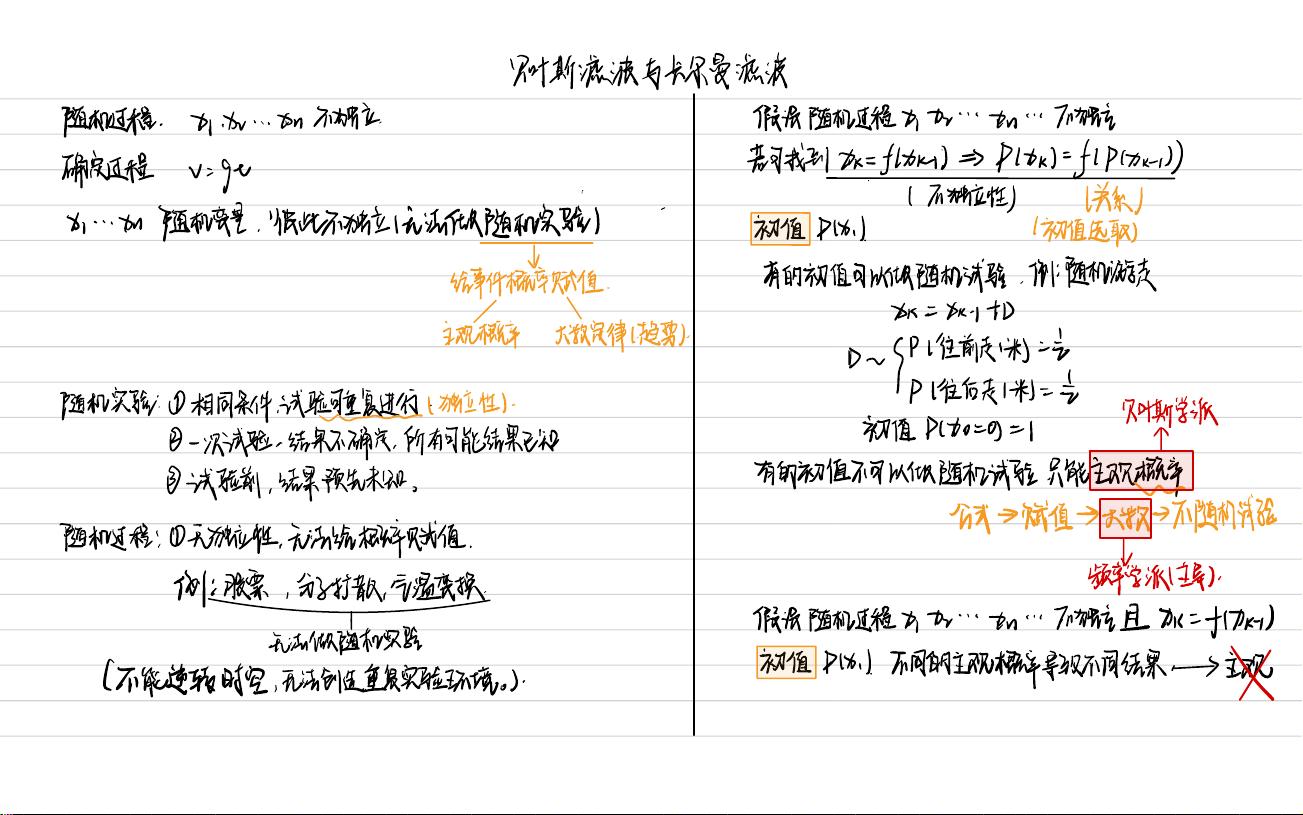
⻉叶斯
滤波
与
卡
尔
曼
滤液
随机
过程
。
⼒
,
劜
…
加
不
独⽴
,
假设
随机
过程
中
,
加
"
加
…
不
独⽴
确定
过程
tqe
若
可
找到
⼀
拗
州
1
2
1
加州
1171
加州
r
'
l
不
独⽴
性
)
1
关系
1
x.
…
加
随机
覫
,
慨
怀
独⽴
1
⽆法
做
随机
实验
了
'
初
值
1
7
划
1
初
值
选取
)
给
事件
癣
赋值
,
有的
初
值
可以
做
随机
试验
。
作为
随机
游⾛
加
⼆
》
从
1
扪
主观
概率
⼤
牧
定律
1
趋势
⼩
D
~
9171
往
前
⾛
唎
法
随
⽊
⼏
实验
0
相同
条件
,
试验
可
重
有
嫶
1
独⽴性
1
.
P
维
后
⾛
'
粘
去
⻉叶斯
学派
②
⼀次
试验
结果
不
确定
,
所有
可能
结果
已
知
初
值
1
2
1
加
⼆
0
)
=
1
⼈
③
试验
前
,
结果
预先
未知
。
有的
初
值
不
可以
做
随机
试验
,
只能
主观
棺
避
公式
→
赋值
→
⼤
糊
不
随机
试验
随机
过程
⼼
⽆
独⽴性
,
⽆法
给
概率
赋值
,
绯
股票
,
分⼦
扩散
,
⽓温
变换
癖
学派
主导
)
,
ˊ
假
请
随机
过程
中
,
加
"
加
…
不
独⽴
且
加
冰
⼒
则
⽆法
做
随机
实验
(
不能
逆转
时
空
,
⽆法
创造
重复
实验
环境
。
)
,
初
值
抛
⻔
不同的
主观
概率
导致
不同
结果
,
s
𧩙
资源评论


卓小白…
- 粉丝: 44
- 资源: 1









最新资源
- 电子商务_网上商城管理系统_用户身份验证_便捷购物_1740825436.zip
- 商城管理_System_SCUM_1740825333.zip
- 智能公交系统电子站牌设计_STM32_微信小程序_毕业设_1740825532.zip
- 全国地图 省GeoJson 市GeoJson
- MATLAB实现领航追随法与人工势场法融合的车辆编队避障控制策略,MATLAB领航追随法融合人工势场法的车辆编队避障控制策略实现研究,MATLAB基于领航追随法的车辆编队控制,领航追随者与人工势场法的
- 迪恩在线教育素材培训课程网站源码 discuz内核完整资料带数据
- 基于手性光学效应的连续介质束缚态研究:从三维图谱到Q因子图的所见即所得超表面复现分析,基于Comsol模拟:三次谐波效应下的本征手性BIC超表面研究-远场偏振图、手性透射曲线与光学响应的可见性分析
- 和材料性能分析** COMSOL 培训视频,深入解析多物理场仿真技术与应用 **深入解析COMSOL多物理场仿真技术与应用:从结构力学到化学反应的全面分析**,界面仿真和流控模拟 COMSO
- 找高手:应该如何训练工程造价的大模型?
- NOIP2009年提高组NOI Linux和Cena测评环境与数据
- 手把手项目实践:用Labview制作一个电子秤的485上位程序
- golang画图库演示程序源码
- IntelCacheAccelerationSoftware,傲腾加速软件
- 昆仑通态MCGS与欧姆龙E5CC温控器通讯:PID控制及输出启停功能实现,欧姆龙E5CC温控器与昆仑通态MCGS的PID通讯方式及输出启停(KUNL-1),昆仑通态MCGS与欧姆龙E5CC温控器通讯+
- 补码计算与进制转码学习
- 《从0到1:手把手教你OpenCV下载安装秘籍》
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


