

学习文档 仅供参考
ABB[a]-J-6ABB 机器人的程序编程
6.1 任务目标
➢ 掌握常用的 PAPID 程序指令。
➢ 掌握根本 RAPID 程序编写、调试、自动运行和保存模块。
6.2 任务描述
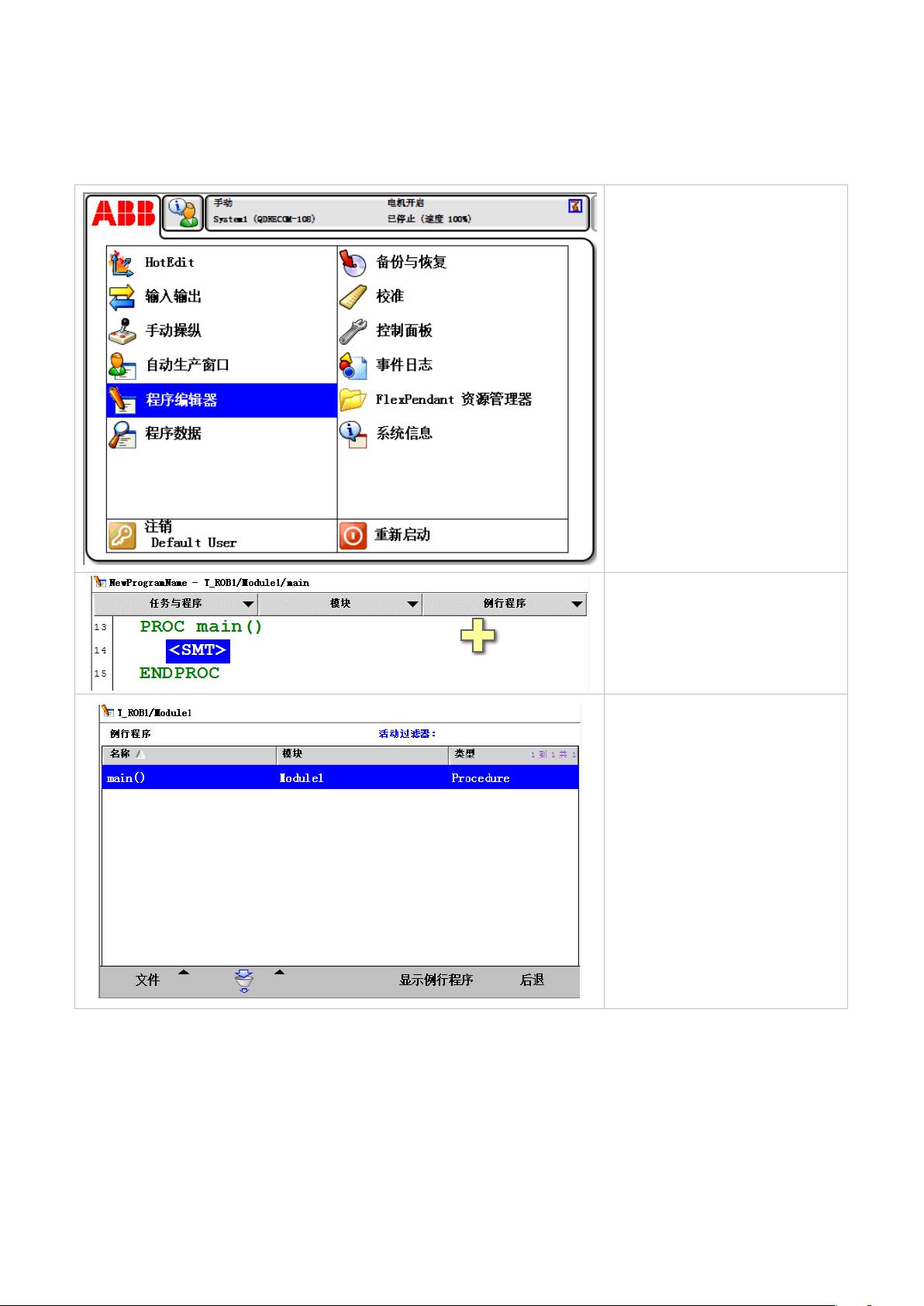
建立程序模块,模块下建立例行程序 main 和 Routine1,在 main 程序下进行运动指令的根本操作练习。
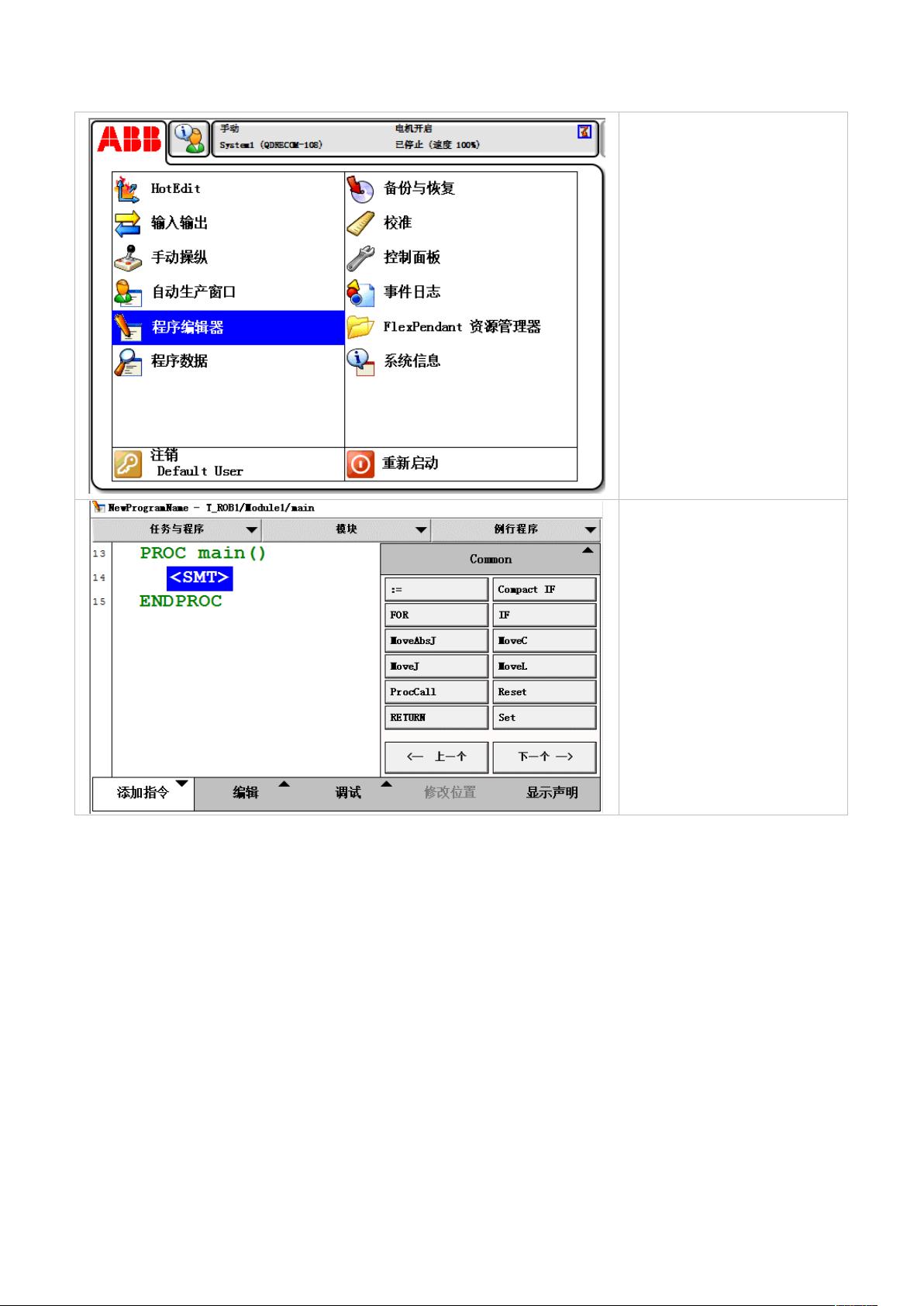
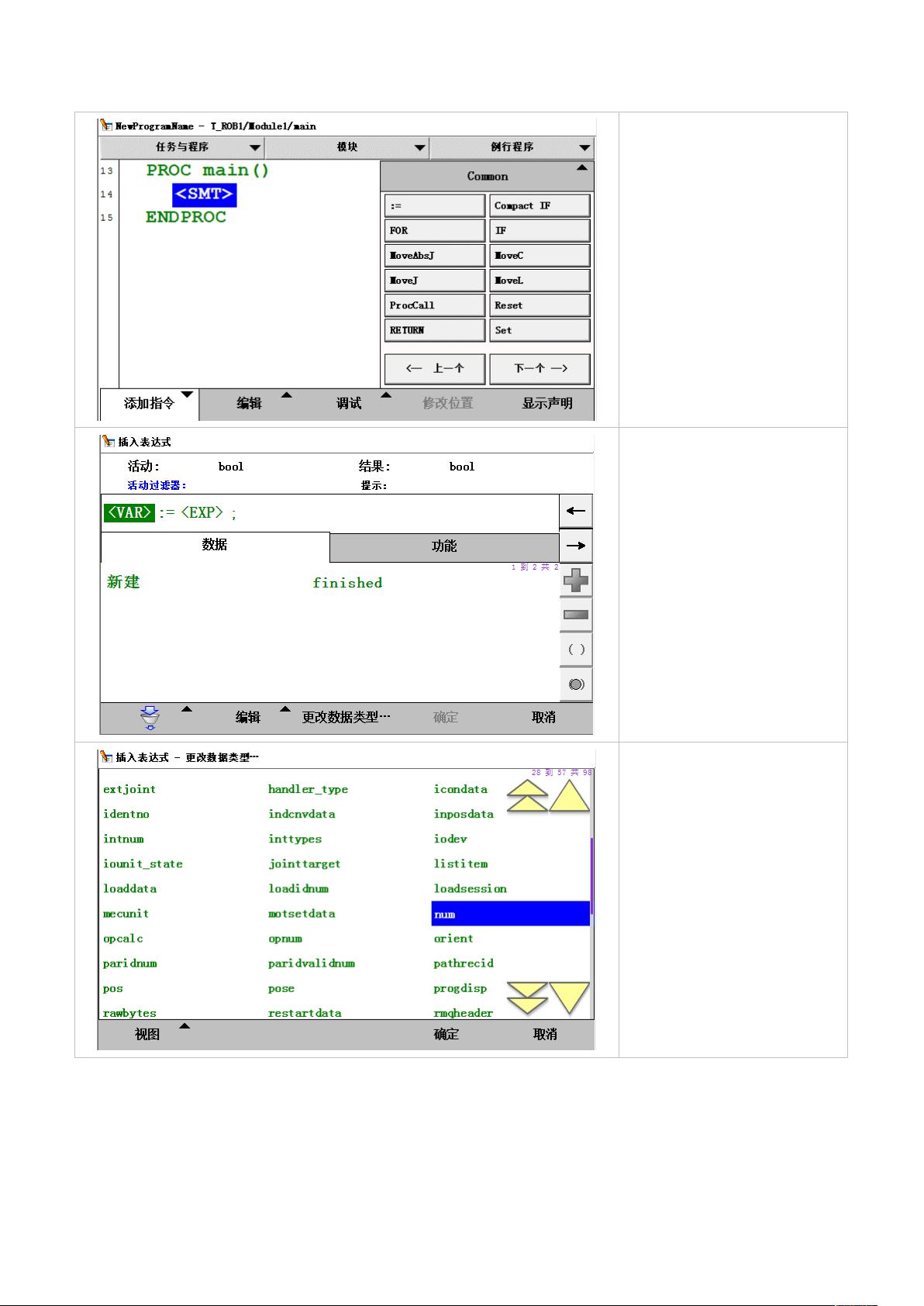
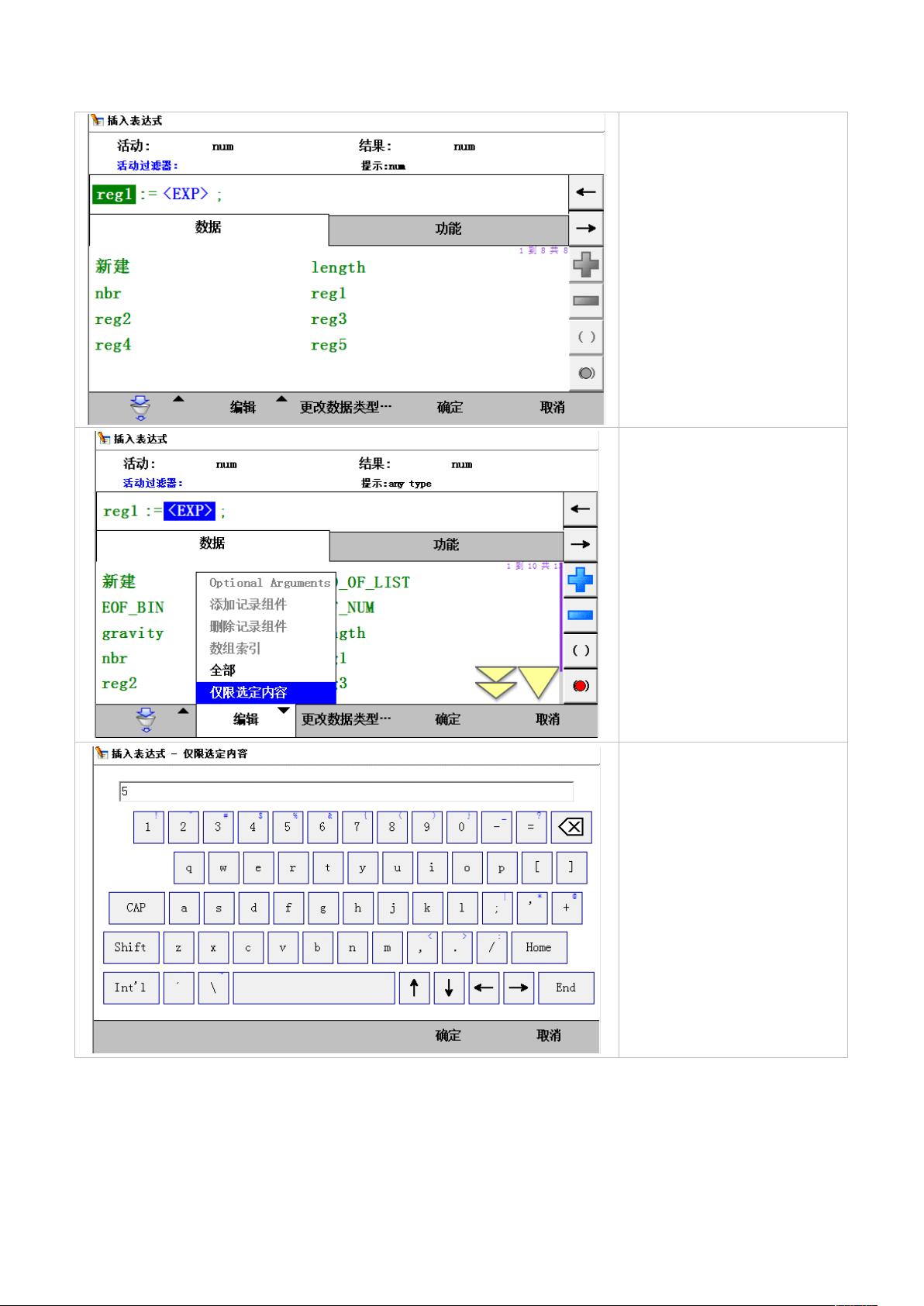
掌握常用的 RAPID 指令的使用方法。
建立一个可运行的根本 RAPID 程序,内容包括程序编写、调试、自动运行和保存模块。
6.3 知识储藏
程序模块与例行程序
RAPID 程序中包含了一连串控制机器人的指令,执行这些指令可以实现对机器人的控制操作。
应用程序是使用称为 RAPID 编程语言的特定词汇和语法编写而成的。RAPID 是一种英文编程语言,所包
含的指令可以移动机器人、设置输出、读取输入,还能实现决策、重复其他指令、构造程序、与系统操作
员交流等功能。RAPID 程序的根本架构如下列图:
RAPID 程序
程序模块 1
程序模块 2
程序模块 3
程序模块 4
程序数据
主程序 main
例行程序
中断程序
功能
程序数据
例行程序
中断程序
功能
…
…
…
…
程序数据
例行程序
中断程序
功能
RAPID 程序的架构说明:
1) RAPID 程序是由程序模块与系统模块组成。一般地,只通过新建程序模块来构建机器人的程序,而
系统模块多用于系统方面的控制。
2) 可以根据不同的用途创立多个程序模块,如专门用于主控制的程序模块,用于位置计算的程序模块,
用于存放数据的程序模块,这样便于归类管理不同用途的例行程序与数据。
3) 每一个程序模块包含了程序数据、例行程序、中断程序和功能四种对象,但不一定在一个模块中都
有这四种对象,程序模块之间的数据、例行程序、中断程序和功能是可以互相调用的。
4) 在 RAPID 程序中,只有一个主程序 main,并且存在于任意一个程序模块中,并且是作为整个 RAPID
剩余38页未读,继续阅读
资源评论


学习使人快乐张
- 粉丝: 103
- 资源: 6万+









最新资源
- Linux环境下编译图像查看工具View-image的Ubuntu实践教程
- 基于STM32视频监控系统源码(高分毕业设计项目).zip
- 利用 JavaScript 的 Date 对象获取当前时间,在网页上展示实时数字时钟的源码
- 实验八、Linux gcc源码编译实验(二).doc
- 基于STM32的视频监控系统项目源码(高分毕业设计项目)
- Linux环境下的Opencv编译运行指南:基于Ubuntu系统的图像显示程序实现
- lab8-课外扩展任务-编译opencv程序.7z
- 八月最新完美运营版 PHP在线客服系统服务器完整打包
- 实验九、编写Linux Shell脚本.doc
- 中文字体用于matplotlib
- 实验九+、Linux Shell变量与环境配置.doc
- web服务调用代码,C#实现
- lab9-Linux脚本.7z
- 1736408193931885_110_f0c21c4061d20975109eb2c4bcb0aa89.apk
- 一个 用 HTML 构建页面,JavaScript 处理下拉菜单联动的源码
- 实验十、Linux网络参数配置与网络服务管理.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


