ABBJ8ABB机器人高级编程.docx
版权申诉
125 浏览量
2023-07-11
22:01:59
上传
评论
收藏 1.22MB DOCX 举报

ABB[a]-J-8ABB 机器人高级编程
8.1 任务目标
➢ 掌握 ABB 机器人 RAPID 高级编程方法。
➢ 掌握常用的 RAPID 程序指令。
8.2 任务实施
8.2.1 事件程序 EventRoutine
Event Routine 是使用 RAPID 指令编写的例行程序去响应系统事件的功能。
比如在系统启动时,检查 IO 输入信号的状态,就可通过 Event Routine 来完成。
要注意的是,在 Event Routine 中不能有移动指令,也不能有太复杂的逻辑判断,防止程序死循环,影
响系统的正常运行。
下面我们就以响应系统事件 POWER_ON 为例子,进行此功能的说明。
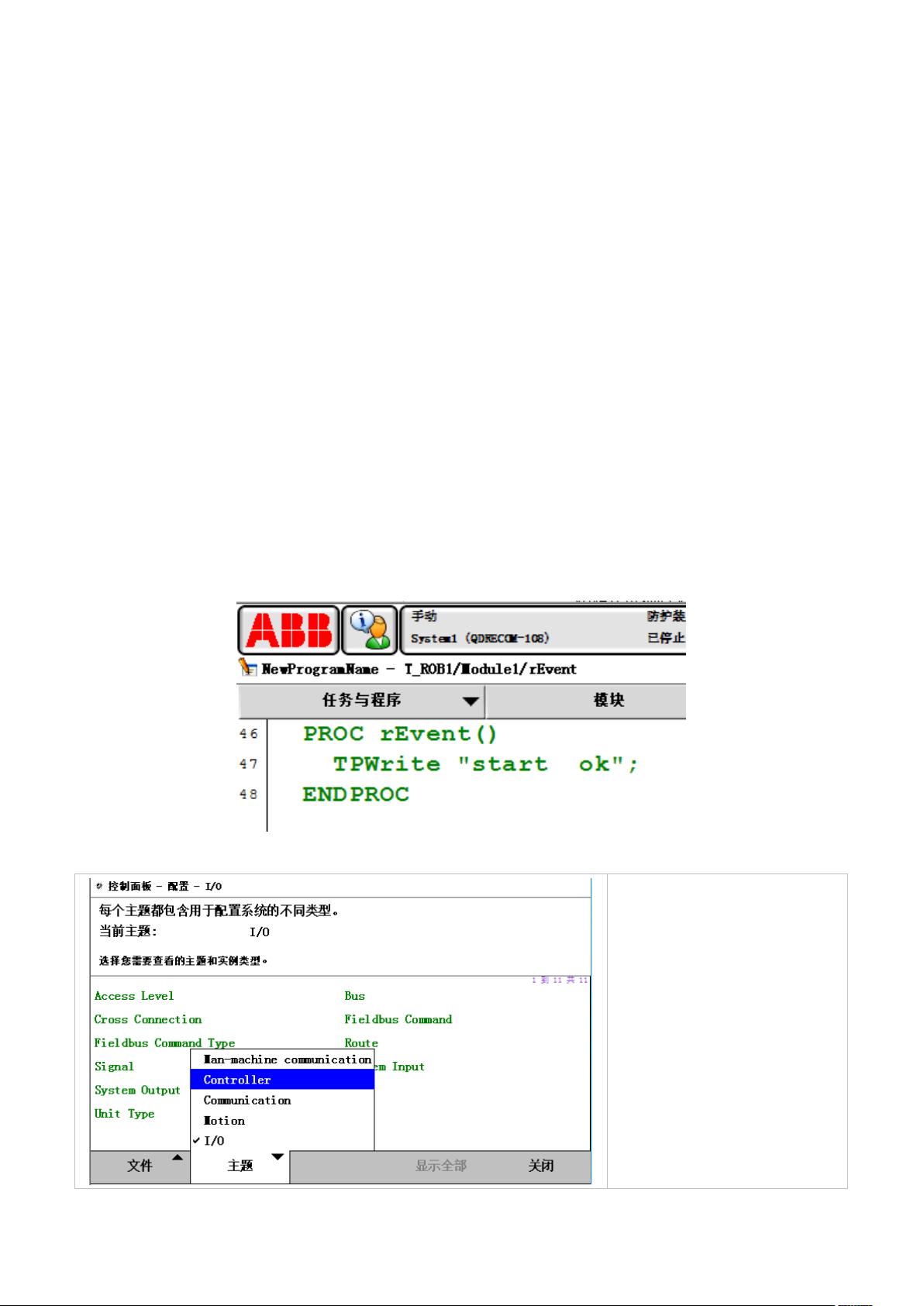
任务描述:编写 rEvent 例行程序,打印“Start OK”字样,如果在开启后屏幕上显示,则说明这个例行程序与
POWER_ON 系统事件关联。
操作步骤:
1. 进入“控制面板”-“配置”画面,
点 击 “ 主 题 ” , 选 择
“Controller”。




剩余33页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 81
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











