

2019/9/23 通天塔 LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
http://tongtianta.site/paper/8117 1/24
通天塔 (/)
LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and
Mapping on Variable Terrain
LeGO-LOAM:轻型和地面优化的激光雷达测距和可变地形测绘
论文:http://static.tongtianta.site/paper_pdf/1f7896c2-08b7-11e9-b8e4-00163e08bb86.pdf
(http://static.tongtianta.site/paper_pdf/1f7896c2-08b7-11e9-b8e4-00163e08bb86.pdf)
报错 申请删除
Tixiao Shan and Brendan Englot
Tixiao Shan and Brendan Englot
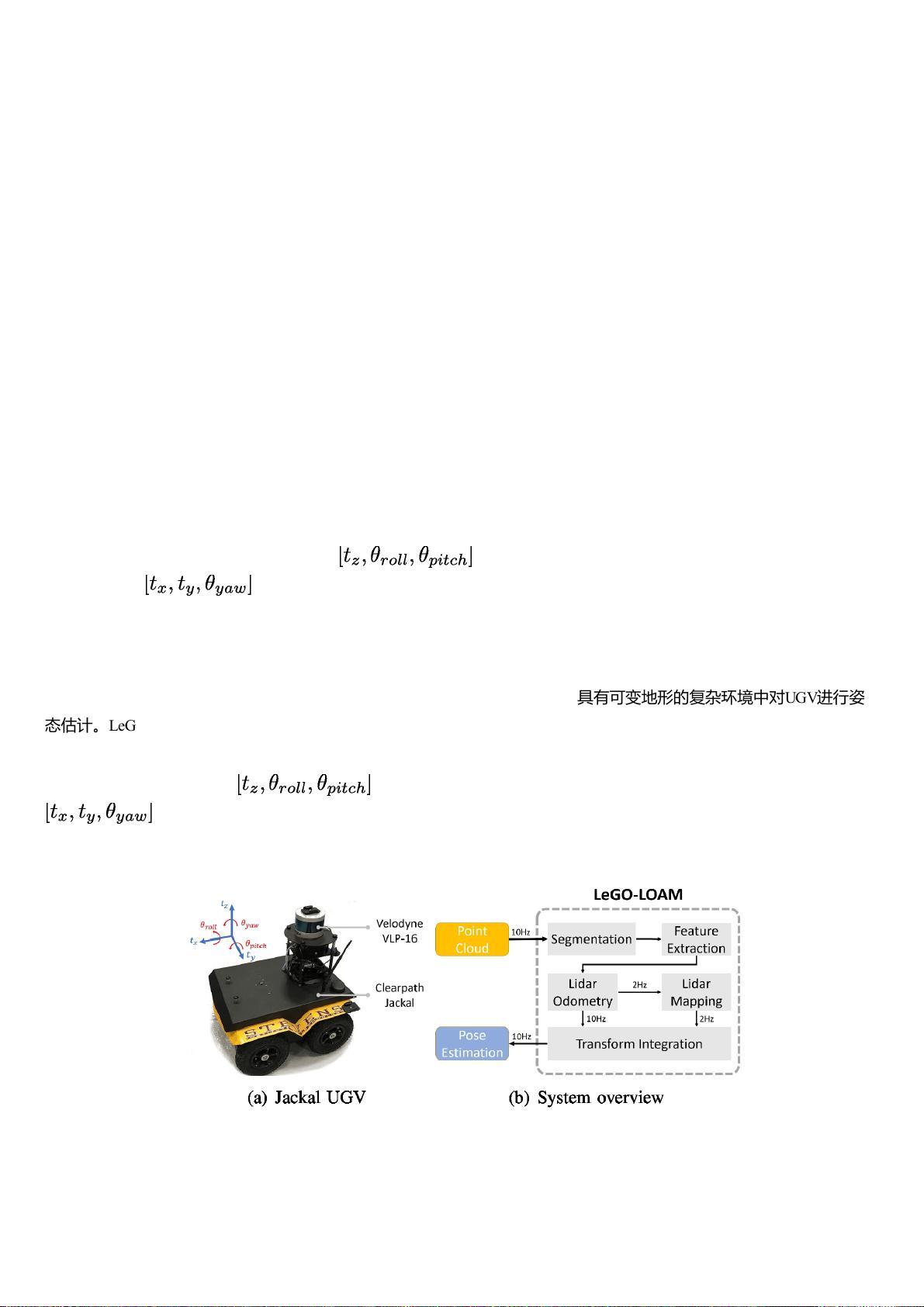
Abstract— We propose a lightweight and ground-optimized lidar odometry and mapping method, LeGO-LOAM, for realtime six
degree-of-freedom pose estimation with ground vehicles. LeGO-LOAM is lightweight, as it can achieve realtime pose estimation
on a low-power embedded system. LeGOLOAM is ground-optimized, as it leverages the presence of a ground plane in its
segmentation and optimization steps. We first apply point cloud segmentation to filter out noise, and feature extraction to obtain
distinctive planar and edge features. A two-step Levenberg-Marquardt optimization method then uses the planar and edge
features to solve different components of the six degree-of-freedom transformation across consecutive scans. We compare the
performance of LeGO-LOAM with a state-of-the-art method, LOAM, using datasets gathered from variable-terrain environments
with ground vehicles, and show that LeGO-LOAM achieves similar or better accuracy with reduced computational expense. We
also integrate LeGO-LOAM into a SLAM framework to eliminate the pose estimation error caused by drift, which is tested using
the KITTI dataset.
摘要 - 我们提出了一种轻量级和地面优化的激光雷达测距和测绘方法LeGO-LOAM,用于与地面车辆进行实时六自由度
姿态估计。LeGO-LOAM重量轻,因为它可以在低功耗嵌入式系统上实现实时姿态估计。LeGOLOAM经过地面优化,因
为它在分割和优化步骤中利用了地平面的存在。我们首先应用点云分割来滤除噪声,并进行特征提取以获得独特的平面
和边缘特征。然后,两步Levenberg-Marquardt优化方法使用平面和边缘特征来解决连续扫描中六自由度变换的不同分
量。我们使用从地形车辆的变地形环境收集的数据集,将LeGO-LOAM的性能与最先进的方法LOAM进行比较,并表明
LeGO-LOAM在降低计算成本的同时实现了类似或更好的准确性。我们还将LeGO-LOAM集成到SLAM框架中,以消除由
漂移引起的姿态估计误差,该误差使用KITTI数据集进行测试。
I. INTRODUCTION
一,导言
Among the capabilities of an intelligent robot, mapbuilding and state estimation are among the most fundamental prerequisites.
Great efforts have been devoted to achieving real-time 6 degree-of-freedom simultaneous localization and mapping (SLAM) with
vision-based and lidar-based methods. Although vision-based methods have advantages in loop-closure detection, their sensitivity
作者\标题\内容
搜索

剩余23页未读,继续阅读
资源评论













