





PID 控制器设计与研究
一. 实验目的:
1 学习 PID(Proporitional/Integral/Derivative)控制技术,对改善系统性能的作
用。
2. 学习 MATLAB 的使用。
二. 实验仪器:
计算机
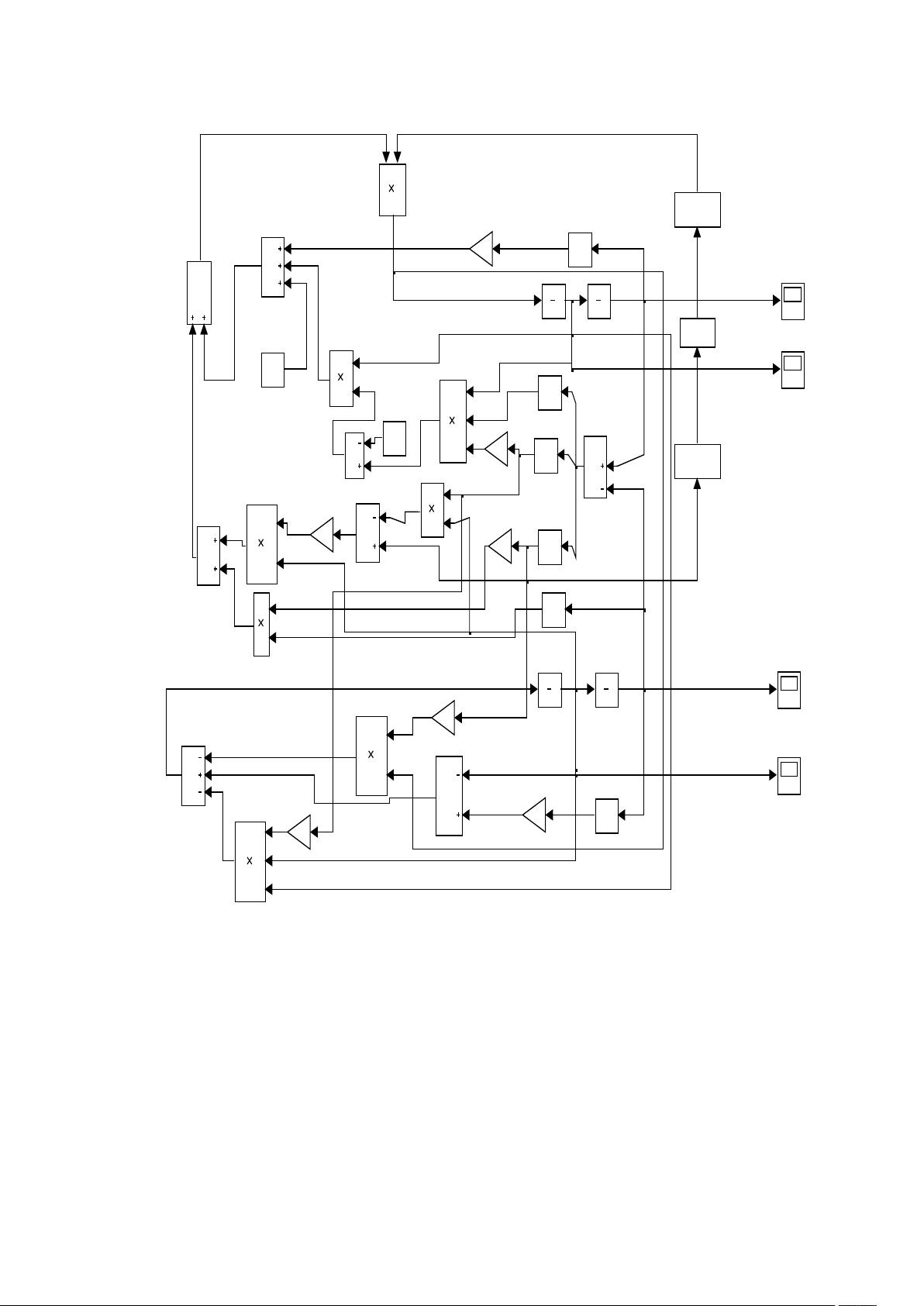
MATLAB/SIMULINK 仿真环境
三. 实验内容:
给定控制系统结构如下:
当控制对象(Plant)分别以以下2种被控对象模型,试确定适用的 PID 控制方式(P、
PD、PI、PID 几种控制方式),手工调试 P,I,D 各个参数,使闭环系统的阶跃响应(Rreponse
to Step Command)尽可能地好(稳定性、快速性、准确性),满足系统的要求。
1. 某系统开环传递函数为:
0
100
( )
(0.1 1)(0.01 1)
G s
s s s
=
+ +
要求加入校正后系统的动态性能指标为:
% 15%, 0.1 , 0.05
ss
ts s e
s
£ £ £
2. 某系统开环传递函数为:
2
0.775
( )
(31.7 1)
G s
s
=
+
要求加入校正后系统的动态性能指标为:
% 15%, 30 , 0.05
ss
ts s e
s
£ £ £
四.实验要求:
1.测试不加 PID 控制时系统的阶跃响应,分析上述对象特征;














