人脸识别欧拉角及位移矩阵计算及求解

——人脸识别 坐标系变换及求解
背景:
在人脸识别中,利用相机来对图像进行拍摄。相机拍摄到图片的点与实际物体对应的
点之间有着旋转和位移的变换。在有确定点的时候我们往往利用多组对应点,去训练一个
旋转和位移模型,为人脸欧拉角及位移对判断有一个可靠的转化模型。
这个过程中,具体包括四个坐标系的转化及旋转位移方程的求解。其中四个坐标系
为,世界坐标系、相机坐标系、像面坐标系、像素坐标系;其中方程求解采用罗德里格矩
阵模型求解法。
一.三次坐标变换
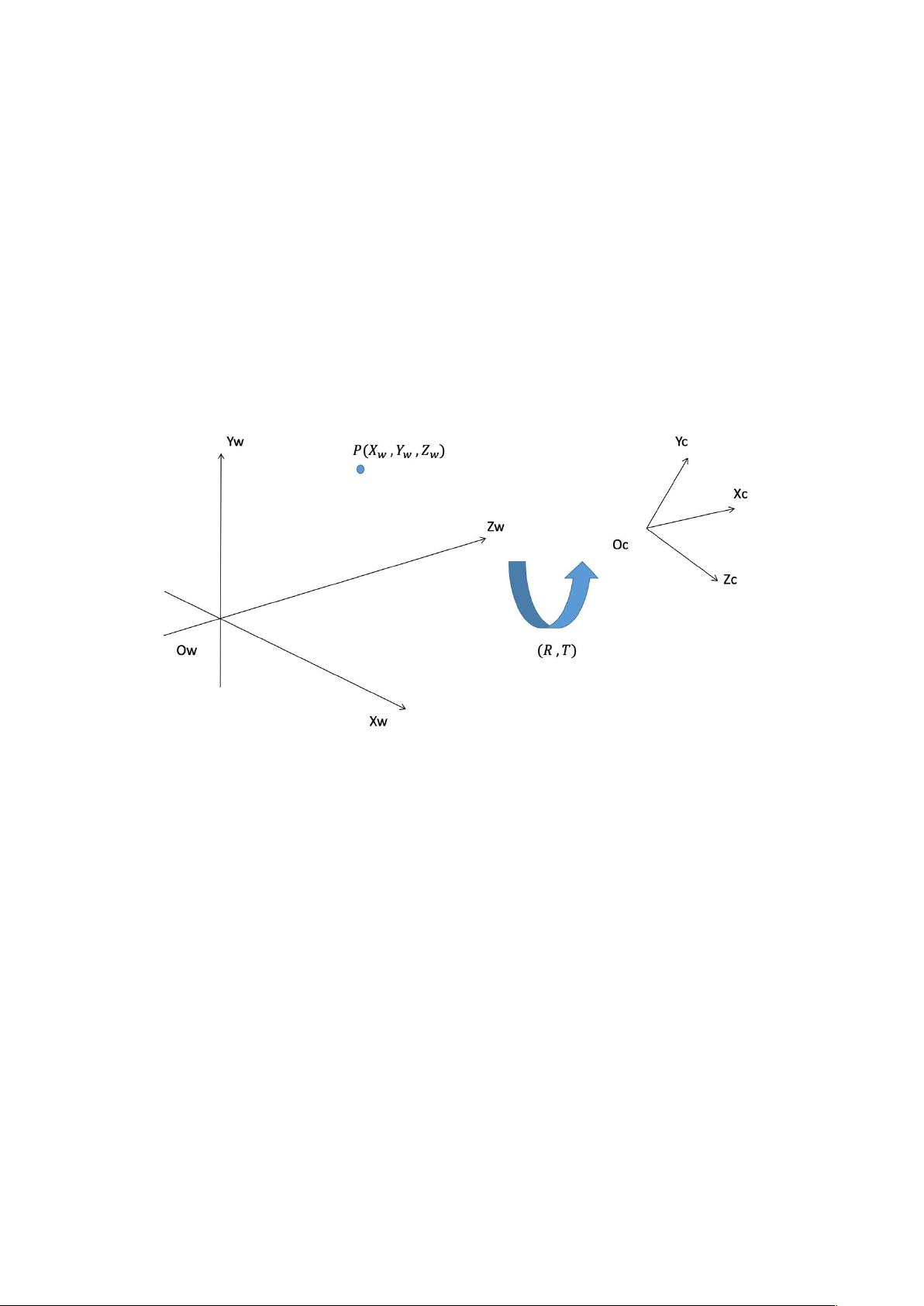
1.1 ——世界坐标系 相机坐标系
P 点为 Ow-XwYwZw 世界坐标系下点一点,经过旋转和位移得到相机坐标系下点 P 点坐
标。其中 R 代表 3*3 的旋转矩阵,T 代表 3*1 的位移矩阵。接下来就对旋转矩阵进行求解。
假设 Z 轴不动绕着 Z 轴旋转,对 XY 轴所在平面进行投影,可以得到 XY 轴的旋转矩阵 R1,
同理可以得到,XZ 轴旋转矩阵 R2,YZ 轴旋转矩阵 R3。接下来推导介绍 R1 旋转矩阵。














评论1