

第 26 卷第 10 期
2009 年 10 月
控 制 理 论 与 应 用
Control Theory & Applications
Vol. 26 No. 10
Oct. 2009
基基基于于于滑滑滑模模模观观观测测测器器器的的的车车车辆辆辆电电电子子子稳稳稳定定定性性性控控控制制制系系系统统统故故故障障障重重重构构构
于金泳
1
, 刘志远
1
, 陈 虹
2
(1. 哈尔滨工业大学 控制科学与工程系, 黑龙江 哈尔滨 150001;
2. 吉林大学 控制科学与工程系, 吉林 长春 130025)
摘要: 针对车辆电子稳定性控制系统的横摆角速度传感器和侧向加速度传感器故障检测和重构问题, 使用T-S模
糊系统建立了车辆动力学系统的全局模型, 依据滑模控制理论, 给出了基于滑模观测器的传感器故障检测和重构方
法, 且所设计观测器满足给定的从未知输入到故障重构误差的L
2
增益性能要求. 最后通过实测数据, 验证了方法是
可行的.
关键词: 电子稳定性控制; 故障检测; 故障重构; T-S模糊系统
中图分类号: TP277 文献标识码: A
Fault reconstruction in the vehicle electronic stability control
based on sliding mode observers
YU Jin-yong
1
, LIU Zhi-yuan
1
, CHEN Hong
2
(1. Department of Control Science and Engineering, Harbin Institute of Technology, Harbin Heilongjiang, 150001, China;
2. Department of Control Science and Engineering, Jilin University, Changchun Jilin, 130025, China)
Abstract: For the global dynamic model of a vehicle based on fuzzy Takagi-Sugeno(T-S) system, we discuss an on-line
fault detection and reconstruction scheme for the yaw rate and lateral acceleration sensor in a vehicle electronic stability
control system. The observer is designed based on the sliding mode control theory, the L
2
gain from the unknown input
to the fault reconstruction error is guaranteed. Real data obtained from the vehicle verifies the effectiveness of the design
technique.
Key words: electronic stability control; fault detection; fault reconstruction; T-S fuzzy systems
文文文章章章编编编号号号: 1000−8152(2009)10−1057−07
1 引引引言言言(Introduction)
随着车辆可靠性要求的不断提高, 对车辆电子稳
定性控制(electronic stability control, ESC)系统的故
障诊断受到了更多的关注
[1∼4]
. 侧向加速度传感器
和横摆角速度传感器向ESC控制器提供主要的车辆
运行状态信息, 因此对其检测和重构是非常必要的.
文献[1∼3] 利用解析冗余生成残差, 对传感器进行
故障检测: 文献[4]使用高增益观测器对传感器故障
进行估计. 这些方法都假设车速相对平稳. 然而在实
际车辆行驶过程中, 故障应该尽可能实时进行检测,
并根据故障情况及时采取处理, 以防止发生交通事
故. 因此, 研究在不同车速包括车辆进行加减速等条
件下的ESC系统传感器故障诊断就更为重要.
本文首先对汽车动力学模型进行分析, 建立了基
于模糊T-S模型的全局车辆动态模型. 在第3部分使
用滑模观测器设计了故障重构观测器, 最后在实车
上对上述方法进行了验证, 给出了实验结果.
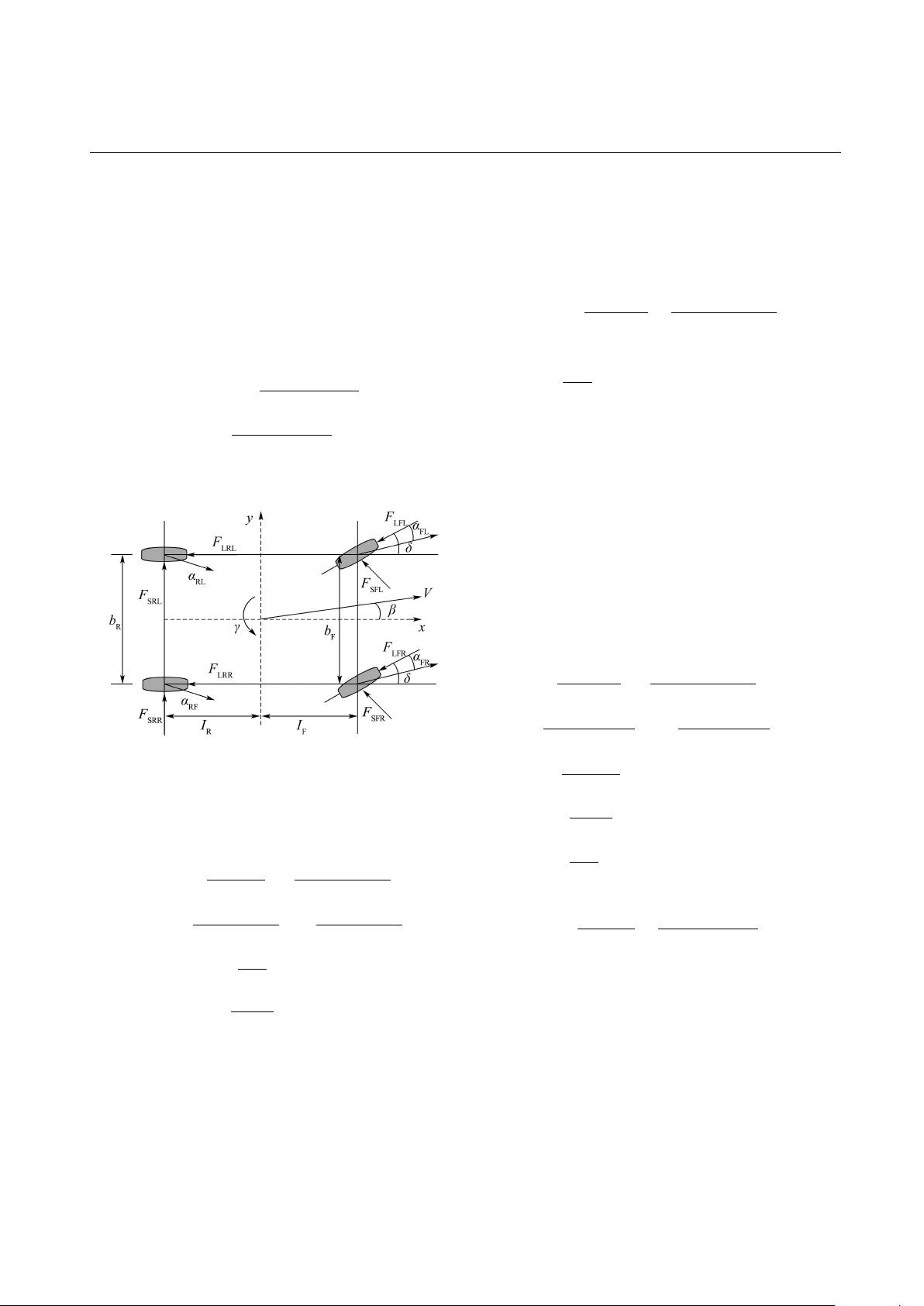
2 车车车辆辆辆动动动力力力学学学模模模型型型(Vehicle dynamics mod-
elling)
仅考虑车辆侧向、纵向以及横摆运动, 忽略侧
倾、悬架动态特性, 建立车辆动力学模型如图1所示.
车辆动力学方程可以描述为式(1)
[5]
:
˙
β =
cos β
m · v
4
P
i=1
F
yi
−
sin β
m · v
4
P
i=1
F
xi
− γ,
I
z
˙γ = (F
yFR
+ F
yFL
) · l
F
−
(F
yRR
+ F
yRL
) · l
R
+ M
z
,
α
y
= v(
˙
β + γ),
M
z
= (F
xRR
− F
xRL
) ·
b
R
2
+
(F
xFR
− F
xFL
) ·
b
F
2
,
F
si
= C
i
α
i
, i = FL/FR/RL/RR.
(1)
收稿日期: 2008−10−06; 收修改稿日期: 2009−01−08.
基金项目: 国家杰出青年科学基金资助项目(60725311)
剩余6页未读,继续阅读
资源评论


weixin_38662367
- 粉丝: 5
- 资源: 912









最新资源
- 终极 Python 学习指南.zip
- 0cb0a44eb741d2875daa5f71f43fce42.dwg
- 用于构建 Web 应用程序的 Python 微框架 .zip
- Screenshot_20241123_213327_com_tencent_mm_MMWebViewUI.jpg
- 用于教学,学习 Python 3 的 Jupyter 笔记本.zip
- 用于执行 RPA 的 Python 包.zip
- opencv模板匹配加速原理源码和测试图像
- Screenshot_20241123_212743_com_tencent_mm_LauncherUI.jpg
- 修帝全伪实体v8(2).zip
- 用于在 Amazon SageMaker 上训练和部署机器学习模型的库.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


