
基于基于STM32与与Android系统远程控制的两轮自平衡车设计系统远程控制的两轮自平衡车设计
当前市场上已有的平衡车需要站在车上操作遥杆来进行控制,应用范围小,因此设计了以STM32单片机作为主
控芯片,配合Android上位机进行远程控制的系统。车载摄像头传感器和温湿度传感器可以实时记录周边环境情
况,促使相应处理机制对环境做出应答,保证使用者拥有一个更加安全、可靠、使用寿命更长的可远程控制自
主平衡车。实验结果表明,设计的两轮自平衡车平衡稳定性好,抗干扰能力强,能实现Android系统的远程平衡
控制。
纪伟1,曾宪阳2,左翠翠2,李士垚3
(1.南京工程学院 自动化学院,江苏 南京,211167;2.南京工程学院 工业中心,江苏 南京,211167;3.南京工程学院
电力工程学院,江苏 南京,211167)
摘要摘要:当前市场上已有的平衡车需要站在车上操作遥杆来进行控制,应用范围小,因此设计了以STM32单片机作为主控
芯片,配合Android上位机进行远程控制的系统。车载摄像头传感器和温湿度传感器可以实时记录周边环境情况,促使相应处
理机制对环境做出应答,保证使用者拥有一个更加安全、可靠、使用寿命更长的可远程控制自主平衡车。实验结果表明,设计
的两轮自平衡车平衡稳定性好,抗干扰能力强,能实现Android系统的远程平衡控制。
关键词 关键词:STM32单片机;Android系统;远程控制;自平衡车;摄像头
中图分类号 中图分类号:U283.1文献标识码:ADOI: 10.19358/j.issn.1674-7720.2017.02.027
引用格式引用格式:纪伟,曾宪阳,左翠翠,等.基于STM32与Android系统远程控制的两轮自平衡车设计[J].微型机与应
用,2017,36(2):90-92,99.
0引言引言
*基金项目:江苏省高等学校大学生实践创新训练计划项目(201411276041Y)当前,随着传感器技术的发展,平衡车越
来越被广泛地应用于交通、安保、巡查等方面[12]。作为一种新的交通、安保等行业方面的工具,平衡车不仅在稳定性上
有着较高的要求,还在远程遥控、实时监控方面有着迫切的需要。本文设计一种基于远程Android上位机客户端进行操控的平
衡车,使其能在远程驾驶、安保、巡查等方面有着更广泛的应用。
1系统设计思路系统设计思路
1.1系统原理分析[系统原理分析[3 4]]
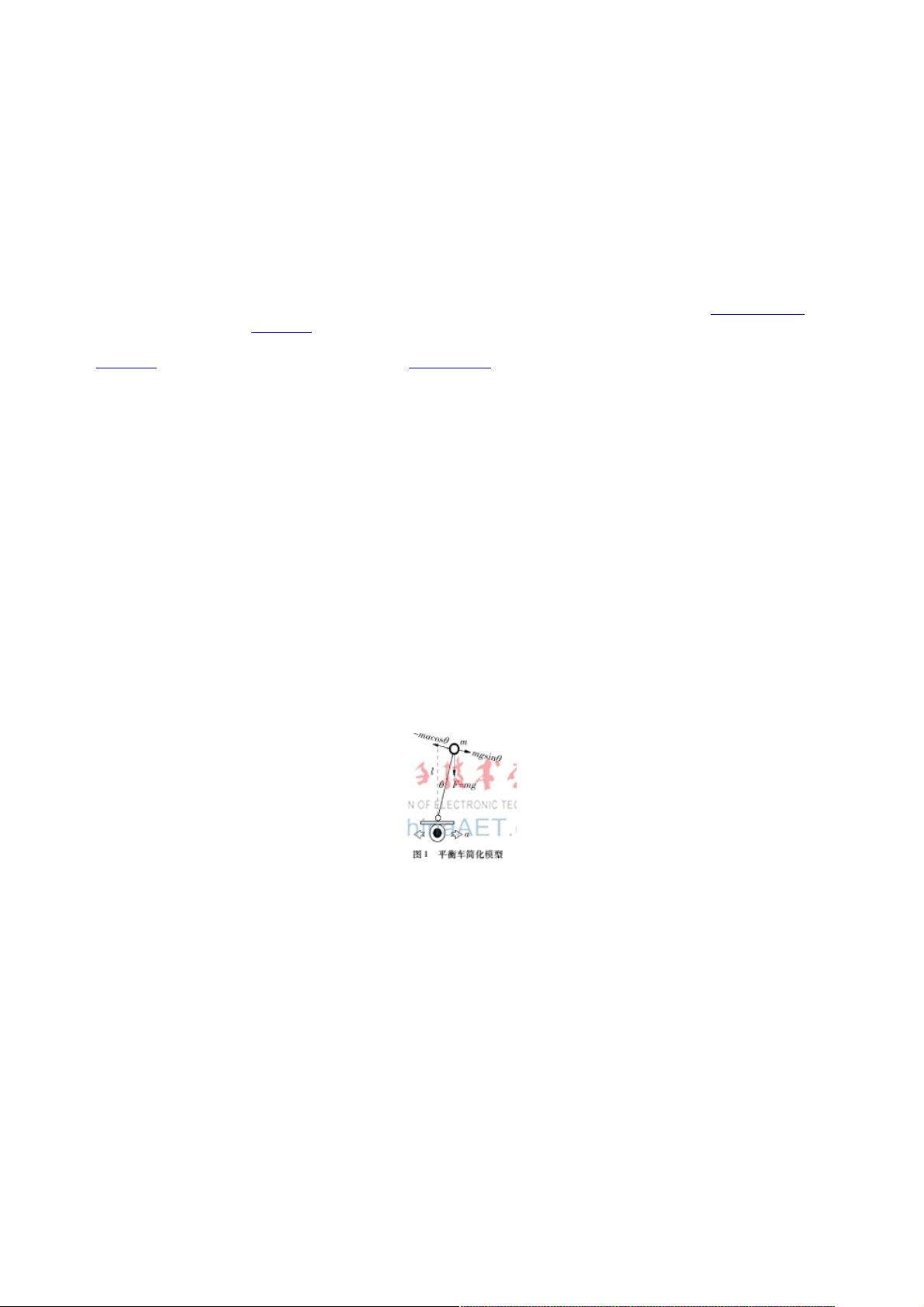
平衡车的力学原理类似于倒立摆的力学原理,如图1所示,根据分析得平衡车的回复力算式:
mgsinθ-macosθ≈mgθ-mk1θ
其中k1为负反馈控制下车轮加速度a与偏角θ的比例因子。忽略空气阻力及摩擦力,得出下式:
F=mgθ-mk1θ-mk2θ′
其加速度a为:
a=k1θ+k2θ′
θ为车模倾角,θ′是角速度,所以只要得到倾角和角速度就可以推算出车模的加速度,从而得到对应的占空比的PWM波,
对平衡车进行准确的控制。
1.2系统整体的设计思路系统整体的设计思路
系统选用STM32单片机作为主控芯片,采集并处理摄像头传感器、编码器、温湿度传感器以及上位机发送的指令,将数
据处理后通过无线视频传输模块发送到上位机,使用基于Android手机系统的APP进行远程控制和远程处理数据,以提高系统
的自主性、安全性、可靠性。系统整体设计框图如图2所示。
资源评论


weixin_38604653
- 粉丝: 3
- 资源: 946









最新资源
- 不同颜色机器护垫检测27-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 西门子S7-1500博图程序 例程,大型生产线案例,程序涵盖有机器人块,汽缸块,电机块,伺服块,可调用,扫码块,可学习参考,快速提升技能 ,编程使用的语言有SCL,LD,STL,GRAPH 非常全
- java gis 开发中,点线面shp样例文件
- C++图书管理系统源代码(高分期末大作业项目)
- 安卓同步助手-1.apk
- GEATC 电脑 G5 型号官网驱动附件(win7/64位)
- LLC开关电源,60V5A半桥LLC串联谐振开关电源设计方案,提供原理图和PCB,BOM表,变压器制作说明书,配套半桥LLC电源软件 备注:原理图和PCB用AD软件打开
- Screenshot_20241229_173539_com.xunmeng.pinduoduo.jpg
- 2基于改进粒子群算法的微电网多目标优化调度 以微电网的运行成本、环境保护成本之和最小为目标,建立微电网环保与经济调度模型,并采用改进的PSO 算法对优化模型进行求解
- 基于ssm的超市进销存管理系统源码(java毕业设计完整源码+LW).zip
- 三菱PLC程序三菱Q系列案例三菱plc大型自动化程序生产线程序 规格如下: Q系列大型程序伺服12轴Q01U RS232通讯CCD 应用 实际使用中程序,详细中文注释 2个模块QD70P8,QD7
- 基于ssm的有机蔬菜商城源码(java毕业设计完整源码+LW).zip
- 不同颜色机器护垫检测47-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 基于ssm的游戏售卖网站源码(java毕业设计完整源码+LW).zip
- 基于ssm的企业仓储管理系统源码(java毕业设计完整源码+LW).zip
- 芝麻录屏 电脑高清录屏 会议录屏 直播录屏
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


