

第
卷
第
期
激 光 与 光 电 子 学 进 展
,
年
月
,
机器人视觉三维成像技术综述
卢 荣 胜
,
史 艳 琼
,
胡 海 兵
合肥工业大学仪器科学与光电工程学院
,
安徽 合肥
;
安徽建筑大学机械与电气工程学院
,
安徽 合肥
摘要
本文针对智能制造领域机器人视觉感知中的三维视觉成像技术进行综述
,
系统 地总 结了一 些有 代表性 的机
器人视觉成像方法的特点和实际应用中 的 局 限性
,
内 容 涉及 飞 行 时 间三 维 成 像
、
点 线 扫描 三 维 成 像
、
色 散 共焦 成
像
、
结构光投影三维成像
、
光学偏折成像
、
单目与多目立体视觉三维成像和光场成 像等
.
绘制 了各 种视觉 成像 的图
谱
,
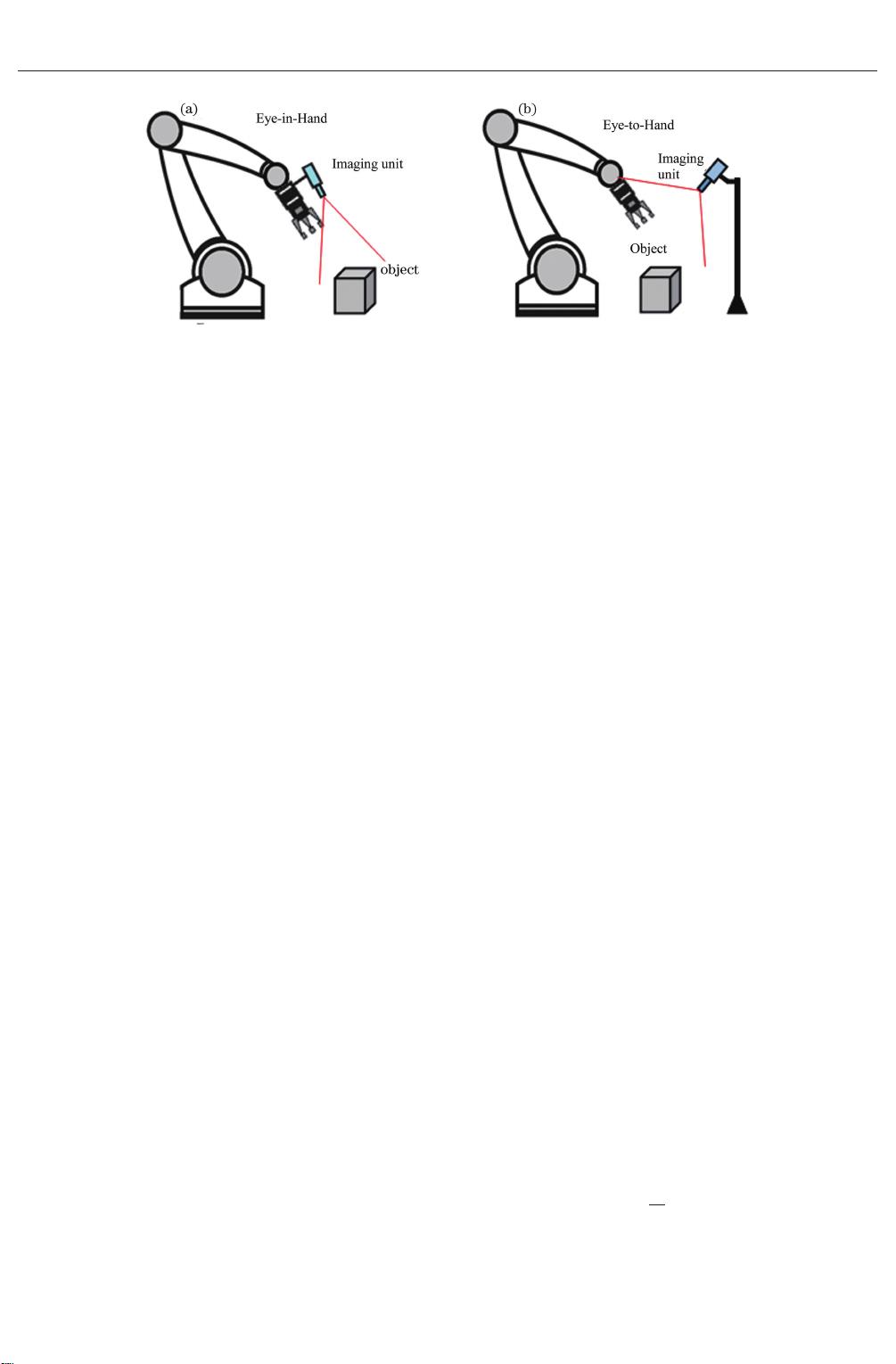
并探讨了机器人手眼系统最佳三维成像方法
.
关键词
机器视觉
;
三维成像
;
手眼系统
;
结构光投影
;
立体视觉
中图分类号
文献标志码
doi
:
/
ReviewofThreeGDimensionalIma
g
in
g
Techni
q
uesforRoboticVision
Schoolo
f
InstrumentScienceandO
p
toGElectronicsEn
g
ineerin
g
He
f
eiUniversit
y
o
f
Technolo
gy
He
f
ei
Anhui
China
Schoolo
f
MechanicalandElectricalEn
g
ineerin
g
AnhuiJianzhuUniversit
y
He
f
ei
Anhui
China
Abstract
Ke
y
words
OCIScodes
收稿日期
:
;
修回日期
:
;
录用日期
:
基金项目
:
国家自然科 学 基金
(
)、
国 家 重点 研 发 计 划
(
)、
国 家 重大 科 学 仪 器开 发 与 应 用专 项
(
)
EGmail
:
;
EGmail
:
引
言
在智 能制造过程 中
,
通过传统的 编程来执行 某
一特定动作的机器人
(
机械手
、
机械手臂
、
机械臂等
,
未作特殊说明时
,
不作严格区分
,
统一称为机器人
),
将难以满足制造业向前发展的需求
.
很多应用场合
下
,
需要为工业机器人安装一双眼睛
,
即机器视觉成
像感知系统
,
使机器人具 备 识别
、
分析
、
处理等更 高
级的功能
.
这在高度自动化的大规模生产中非常重
要
,
只有当工业机器人具有视觉成像感知系统
,
具备
观察目标场景的能 力时
,
才能正确 地 对目标场 景 的
状态进行判断与分 析
,
做到智能 化 灵活地自 行 解决
发生的问题
.
在智 能制造领域
,
机器人视觉 成像系统主 要用
于测量
、
检测
、
识别与引 导 四个方面
[
]
.
例 如
,
在 规
模化的生产过程中
,
视觉检测 具 有非接触
、
高效
、
低
成本
、
自动化程度高等优点
,
免除人工抽检带来的低
效
、
误差与漏检
,
正逐渐取代传统的检测方法
.
在精

剩余18页未读,继续阅读
资源评论













