
Received April 26, 2017, accepted May 17, 2017, date of publication June 8, 2017, date of current version June 27, 2017.
Digital Object Identifier 10.1109/ACCESS.2017.2713419
Barrier Lyapunov Functions-Based Adaptive
Neural Control for Permanent Magnet
Synchronous Motors With Full-State Constraints
YINGYING LIU, JINPENG YU, HAISHENG YU, CHONG LIN, AND LIN ZHAO
School of Automation and Electrical Engineering, Qingdao University, Qingdao 266071, China
Corresponding author: Jinpeng Yu (yjp1109@hotmail.com)
This work was supported in part by the National Natural Science Foundation of China under Grant 61573204, Grant 61573203, Grant
61501276, and Grant 61603204, in part by the China Postdoctoral Science Foundation under Grant 2013M541881, Grant 201303062, and
Grant 2016M592139, in part by the Qingdao Postdoctoral Application Research Project under Grant 2015120, in part by the Qingdao Appli-
cation Basic Research Project under Grant 16-5-1-22-jch, and in part by the Taishan Scholar Special Project Fund Grant TSQN20161026.
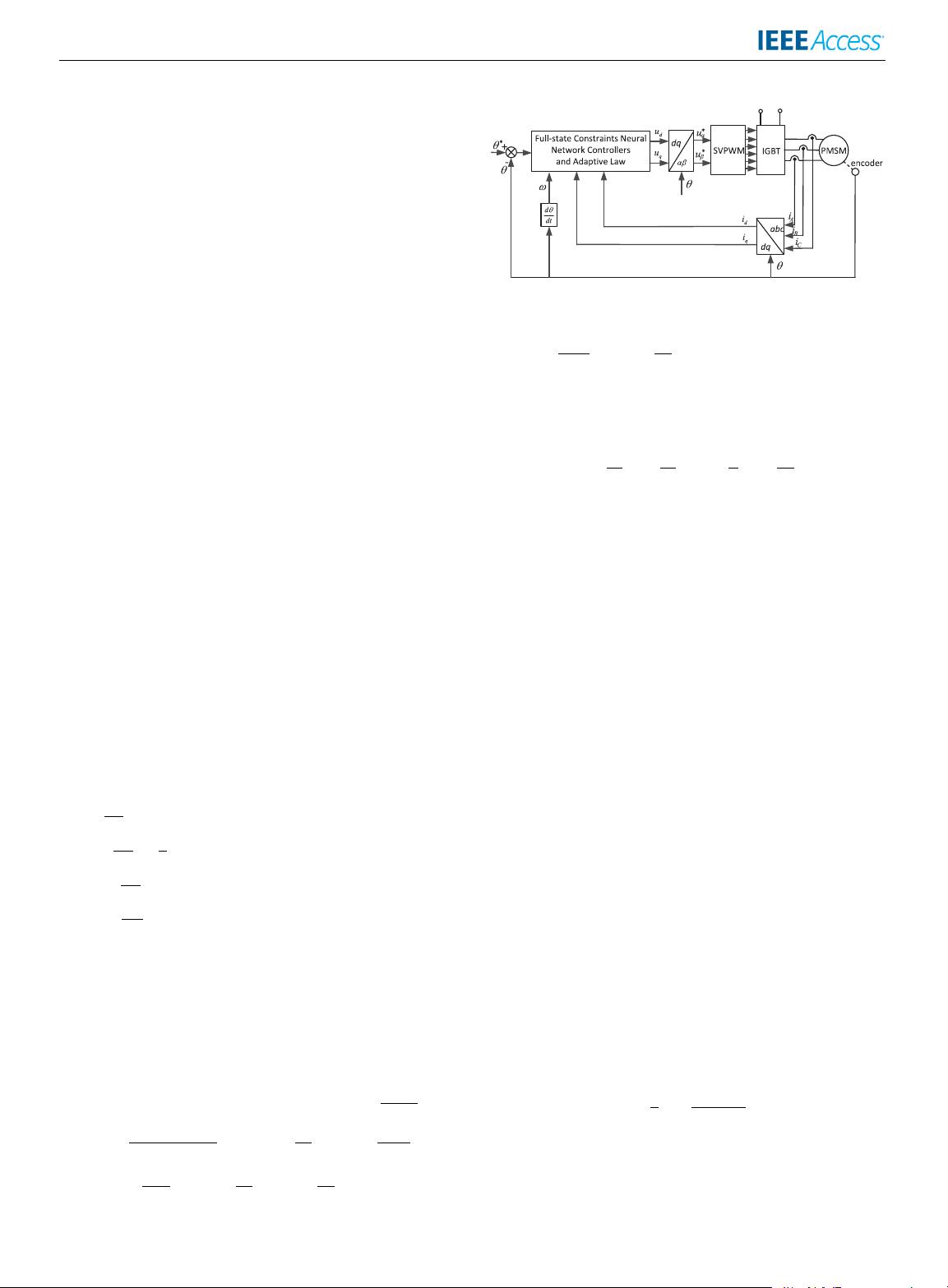
ABSTRACT Considering the requirement of high accuracy and nonlinear problems in drive systems, a novel
adaptive position tracking control approach based on neural networks is presented for permanent magnet
synchronous motors with full-state constraints. The neural networks technique is employed to approximate
the unknown nonlinear functions. Then, the barrier Lyapunov functions are used to restrict the state variables
within a bounded compact set to improve the property of system. The proposed adaptive neural network
controllers can guarantee that all closed-loop variables are bounded, and the full state variables do not exceed
their constraint spaces. Simulation results show the effectiveness and the potentials of the theoretic results
obtained.
INDEX TERMS Adaptive neural control, permanent magnet synchronous motors, full-state constraints,
barrier Lyapunov functions.
I. INTRODUCTION
Recently, permanent magnet synchronous motors (PMSMs)
have attracted more and more attentions owing to their simple
and robust construction, high power density and ruggedness
over other kinds of motors. Nevertheless, the dynamic model
of PMSMs is high nonlinear, strong coupling and multivari-
able. Besides, PMSMs are easily influenced by parameter
variations and external load disturbances. Therefore, it is nec-
essary to find optimal and efficient controllers for PMSMs,
which will be filled with many challenges. A lot of work
has been done to solve the nonlinear problem of PMSMs.
Then many advanced nonlinear control methods have been
proposed and applied to control PMSMs for a higher per-
formance, such as fuzzy logic control [1]–[3], sliding mode
control [4]–[6], dynamic surface control [7], [8], backstep-
ping [9]–[11], Hamiltonian control [12], and other control
methods [13], [14].
In the above control methods, the backstepping approach
has shown its superiority in designing controllers for uncer-
tain systems, especially when the disturbances or uncer-
tainties do not satisfy the matching conditions. At present,
the backstepping method has been successfully applied in
the control system of PMSMs [15]–[17]. But, the state
constraints are ignored on the aforementioned control meth-
ods of PMSMs. The state variables such as rotor angular
velocity, currents, should be constrained by the inherent prop-
erties of the PMSMs. The mathematical model of PMSMs
is nonlinear, including the nonlinear coupling of speed and
current. So it can’t guarantee that the state variables are
always within the desired set only under the control quantity.
For example, the excessive voltage and current affect the
security of the system. Therefore, it is necessary to consider
the full-state constraints [18]–[21] in the control of PMSMs.
To ameliorate the traditional widely used Lyapunov theorem
and satisfy the constraint conditions of the PMSMs system,
some researchers proposed a new kind of Lyapunov func-
tion named barrier Lyapunov function (BLF) [22]–[27] to
restrict the state interval. When the constraint signal tends to
expected conditions, the value of Lyapunov function will tend
to infinity. The constraint variables can be guaranteed in the
given range by BLFs. To the best of our knowledge, there are
no researches on the permanent magnet synchronous motor
(PMSM) with full-state constraints, which motivates us for
this study.
In addition, many adaptive control methods are pro-
posed in [28]–[31] to solve the uncertain nonlinear
10382
2169-3536 2017 IEEE. Translations and content mining are permitted for academic research only.
Personal use is also permitted, but republication/redistribution requires IEEE permission.
See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
VOLUME 5, 2017
剩余6页未读,继续阅读
资源评论


weixin_38502814
- 粉丝: 5
- 资源: 927









最新资源
- 虚拟 Python 环境构建器.zip
- 洪涝灾害应急信息-JAVA-基于springBoot洪涝灾害应急信息管理系统设计与实现(毕业论文+PPT)
- 嗨玩旅游网站-JAVA-基于springboot嗨玩旅游网站设计与实现(毕业论文+PPT)
- 艰难学习 Python3 的代码.zip
- 个性化旅游推荐-JAVA-基于springboot个性化旅游推荐系统的设计与实现(毕业论文+PPT)
- 腾讯云 API 3.0 SDK for Python.zip
- 胡迈的 IA 独裁者完整指南.zip
- 老齐(qiwsir)的Python基础教程Gitbook版.zip
- 编程入门课程中使用的所有幻灯片、答案文件和其他解决方案.zip
- 编写代码来锻炼你的 Python 知识 .zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


