

IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 65, NO. 4, APRIL 2018 3275
Adaptive Fault-Tolerant Control of Wind Turbines
With Guaranteed Transient Performance
Considering Active Power Control of Wind Farms
Dan-Yong Li, Peng Li , Member, IEEE, Wen-Chuan Cai, Yong-Duan Song, Senior Member, IEEE,
and Hou-Jin Chen
Abstract—As high-order nonlinear large-scale systems,
wind farms composed of multiple wind turbines (WTs) need
to adopt active power control (APC) to track the power set
points, rather than the maximum power points. In this paper,
the proportional distribution strategy is utilized to specify
the power set point according to the available output power
of each WT based on the ultra-shor t-term wind speed pre-
diction. Then, we convert the APC problem into the rotor
speed tracking control problem, and a robust adaptive fault-
tolerant control approach based on the barrier Lyapunov
function is developed to track the desired power signal of
each WT with guaranteed transient performance and robust-
ness to actuator faults. The effectiveness and the merit of
the proposed approach are validated by applying it to the
APC of a wind farm.
Index Terms—Active power control (APC), barrier Lya-
punov function (BLF), fault-tolerant, robust adaptive con-
trol, wind farm.
I. INTRODUCTION
A
CTIVE power control (APC) of a wind farm is a prefer-
able technology used to ensure the stability and security
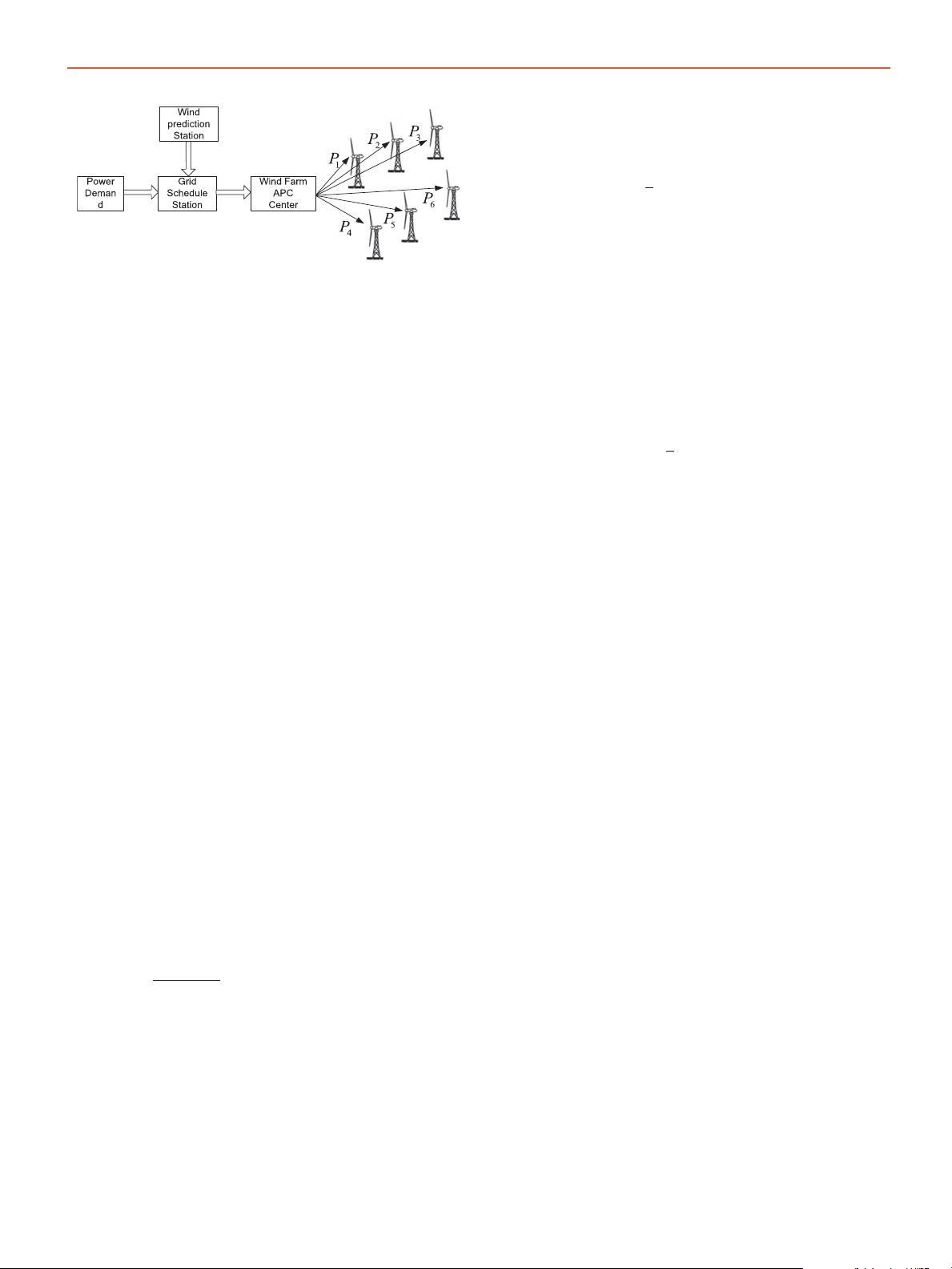
of the wind farms with fluctuating power output [1]. For an APC
system, the wind farm APC center and the variable speed wind
turbines (WTs) control module are included. The APC cen-
ter regulates the output power of the wind farm in a dis-
tributed mode, and this specifies the output power set points
for all WTs according to their regulation abilities and the power
demands [2].
For a wind farm APC center, the power set-points of the
WTs are typically generated by using proportional distribution
Manuscript r eceived August 13, 2016; revised April 3, 2017 and July
16, 2017; accepted July 18, 2017. Date of publication August 31, 2017;
date of current version January 5, 2018. This work was supported in
part by the Beijing Natural Science Foundation under Grant 4174103, in
part by the National Natural Science Foundation of China under Grant
61603030, Grant 51207007, and Grant U1534208, and in part by the
China Postdoctoral Science Foundation under Grant 2016M590040 and
Grant 2017T100032. (Corresponding author: Peng Li.)
D.-Y. Li, P. Li, W.-C. Cai, and H.-J. Chen are with Beijing Jiaotong
University, Beijing 100044, China (e-mail: lidy@bjtu.edu.cn; lipeng@
bjtu.edu.cn; wchcai@bjtu.edu.cn; hjchen@bjtu.edu.cn).
Y.-D. Song is with Beijing Jiaotong University, Beijing 100044, China,
and also with Chongqing University, Chongqing 400044, China (e-mail:
ydsong@bjtu.edu.cn).
Color versions of one or more of the figures in this paper are available
online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIE.2017.2748036
algorithms [2], [3]. Multi-objective distribution algorithms can
dynamically generate the active power set-points with reduced
WT loads while increasing the wind farm power production
[1], [4]–[6]. The WTs adjust the active power by following
the APC center demands. But merely maximum power point
tracking (MPPT) can hardly meet the demand of wind farm
APC. The WTs need to track time-varying power points below
the maximum power level and regulate the wind absorption by
adjusting the rotor speed or pitch angle. Relevant results have
shown significant challenges in designing such WT controllers
with considering the APC center demands.
For an individual WT control, proportional-integral and linear
optimal control methods have been widely used in APC [6]–[9],
but these strategies only deal with the steady-state model around
the operating points and fail to provide acceptable performance
in the presence of inevitable uncertainties such as inherent char-
acteristics of WTs, high-frequency wind speed disturbances,
and stochastic operating conditions of wind farms. Thus, de-
signing nonlinear and adaptive active power controllers is nec-
essary [10]–[12]. To this end, sliding model controllers [13],
[14], backstepping controllers [15], [16], and neural network
(NN) controllers [17]–[19] have been adopted for MPPT. But
most of them need WT information such as the inertia, damp-
ing, etc. Besides, it is crucial to consider system faults such
as actuation failures to maintain the safety performance [20],
[21]. Some works on model predictive control, fault detection
and isolation (FDI), and fault-tolerant control (FTC) are use-
ful to develop a comprehensive control scheme [22]–[24]. But
most controllers can only ensure the steady-state performance,
whereas the output performance of transient phase is rarely con-
sidered, such as the maximum overshoot and rise time. So, it
is crucial to design an adaptive control scheme with guaranteed
transient performance and tolerable actuator fault.
In this work, we use the proportional distribution algorithm to
generate the WT reference power with power prediction model
in [25] and [26] and convert the APC problem to the rotor speed
tracking control problem in terms of the tip-speed-ratio (TSR).
A neuro-adaptive fault-tolerant controller and a robust adap-
tive fault-tolerant controller based on barrier Lyapunov func-
tion (BLF) [27], [28] for rotor speed tracking are proposed,
without using the uncertain information of WT parameters and
actuator faults. The control scheme is easy for implementation
and ensures fast responses, satisfactory transient performance,
0278-0046 © 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See http://www.ieee.org/publications
standards/publications/rights/index.html for more information.
剩余10页未读,继续阅读
资源评论


weixin_38716081
- 粉丝: 3
- 资源: 943









最新资源
- 基于蒙特卡洛模拟与半不变量法的电力系统概率潮流计算程序:考虑光伏不确定性,分析IEEE34节点系统电压与潮流概率特性 ,电力系统随机潮流计算MATLAB程序包含蒙特卡洛模拟法与半不变量法,在光伏不确定
- mysql-installer-community-8.0.18.0.msi
- 深度学习驱动的电动车头盔佩戴检测系统:完整源码与数据集的集成解决方案,深度学习驱动的电动车头盔佩戴检测系统:完整源码与数据集的集成解决方案,基于深度学习YOLOv8+Pyqt5的电动车头盔佩戴检测系统
- IMDb 韩国电视剧及用户评论数据集.zip
- 无功补偿仿真实例: 使用Simulink与MATLAB仿真无功补偿SVG,附有详细文档,基于Simulink与Matlab的无功补偿SVG仿真研究-完整仿真过程与说明文档,无功补偿仿真,simuli
- C++实现扩展卡尔曼滤波器估计移动物体的位置和速度源码+使用教程(自动驾驶汽车项目).zip
- 軟體比對參考腳本,輸出電腦中的軟件和系統信息
- 基于DH参数的UR5机械臂PID轨迹跟踪控制及Simscape物理仿真:角度、速度、加速度与力矩分析,误差曲线展示,UR5机械臂PID轨迹跟踪控制技术:六自由度Simscape物理仿真与DH参数分析的
- 基于卡尔曼滤波跟踪自由落体的速度matlab源码实现-高度曲线(课程作业).zip
- 最佳阿尔茨海默氏症MRI数据集(99%准确率).zip
- E000704金融股权投资类企业网站模板+PHP+Mysql+易优+CMS+建站模板
- 将 Linux 系统配置成为一台 IPv4 路由器 具备 RIP、OSPF(单区域)和路由重分配功能
- 中国地图GeoJSON
- 自动生成爱心,让你的三八节表达爱意有乐趣
- 1737773274623_ NOUV1WnbhDPACrd11NUVOb14GN4+AF+wJggYPBDWg.jpg
- 让你的三八节表达爱意有乐趣,自动生成会动的爱心
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


