ROS程序的创建、编译与执行

ROS 程序的创建、编译与执行
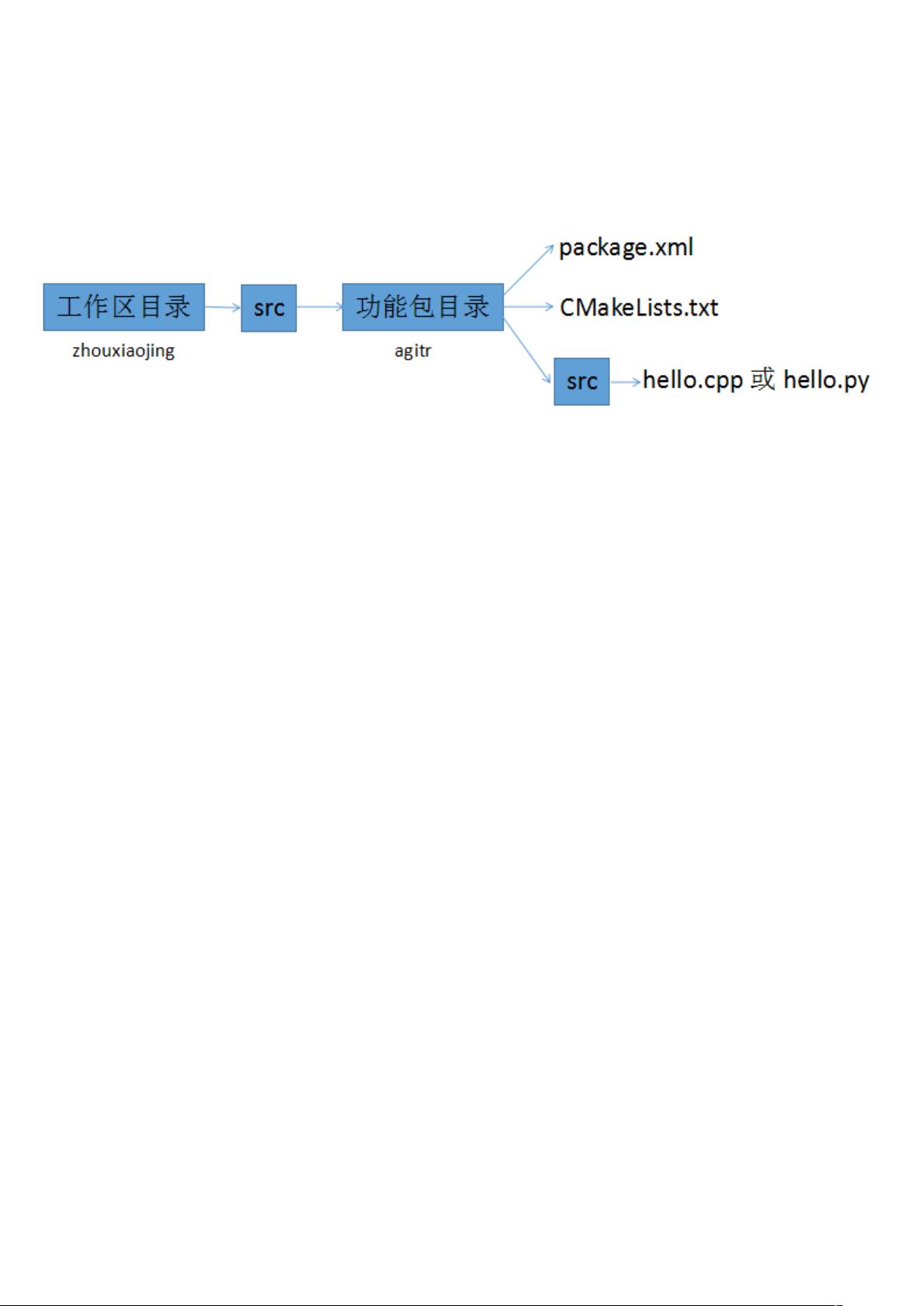
一个完整的 ROS 程序包括三层目录结构,如图所示
1. 创建工作区目录
例如,工作区路径为/home/zjj/ros,在此路径下创建一个名
为 zhouxiaojing 的工作区目录。在指定的工作区路径下输入
mkdir zhouxiaojing
2. 在工作区目录下创建一个叫 src 的子目录,这个子目录用
于存放源代码
mkdir src
3. 创建功能包
在上述 src 子目录下创建功能包,以 agitr 名为例
catkin_create_pkg agitr
在 该 功 能 包 下会 自 动 生 成 两 个 配 置 文 件 package.xml 和
CMakeLists.txt。创建与两个配置文件平行的源文件夹 src,
并把源代码 hello.cpp(或 hello.py)放在里面
mkdir src
资源评论

 lcyangzhanduo2018-07-12刚接触ROS的可以参考一下
lcyangzhanduo2018-07-12刚接触ROS的可以参考一下












