MOVEIT流程图1

需积分: 0 59 浏览量
更新于2022-08-08
收藏 65KB DOCX 举报
MOVEIT流程图1知识点总结
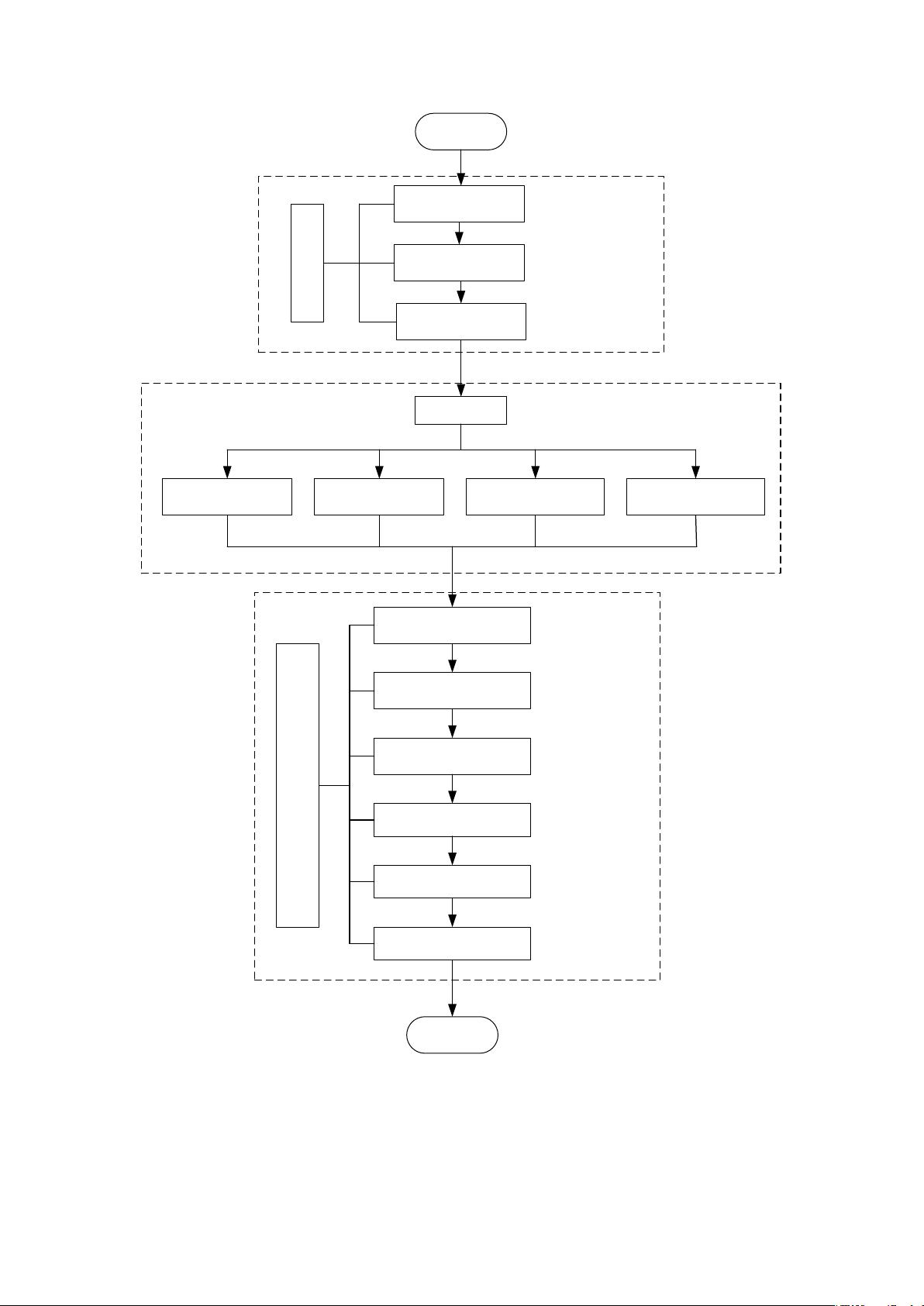
MOVEIT流程图1是基于ROS(Robot Operating System)框架下的一个机器人运动规划系统,它的主要功能是实现机器人的-motion-planning功能,以下是MOVEIT流程图1的知识点总结:
1. SolidWorks建立3D模型
SolidWorks是一个三维计算机辅助设计(CAD)软件,用于创建和设计机器人的三维模型。在MOVEIT流程图1中,SolidWorks用于建立机器人的三维模型,以便于后续的运动规划和仿真。
2. sw2urdf插件
sw2urdf是一个将SolidWorks模型转换为URDF(Universal Robot Description Format)格式的插件.URDF是一个基于XML的机器人描述语言,用于描述机器人的结构和运动学特性。在MOVEIT流程图1中,sw2urdf插件将SolidWorks模型转换为URDF格式,以便于MOVEIT程序模块的使用。
3. URDF模型文件
URDF模型文件是基于URDF格式的机器人模型文件,它描述了机器人的结构、运动学特性和动力学特性。在MOVEIT流程图1中,URDF模型文件是机器人的数字化模型,用于运动规划和仿真。
4. 碰撞检测
碰撞检测是机器人运动规划中的一项重要步骤,它用于检测机器人运动过程中的碰撞风险。在MOVEIT流程图1中,碰撞检测是通过配置碰撞检测算法和参数来实现的。
5. 运动规划配置
运动规划配置是MOVEIT流程图1中的一个关键步骤,它用于配置机器人的运动规划参数,包括运动规划算法、规划约束、规划速度等。在MOVEIT流程图1中,运动规划配置是通过配置文件或编程接口来实现的。
6. 关节组配置
关节组配置是MOVEIT流程图1中的一个重要步骤,它用于配置机器人的关节组参数,包括关节类型、关节角度、关节速度等。在MOVEIT流程图1中,关节组配置是通过配置文件或编程接口来实现的。
7. 初始化位置设置
初始化位置设置是MOVEIT流程图1中的一个重要步骤,它用于设置机器人的初始位置和姿态。在MOVEIT流程图1中,初始化位置设置是通过配置文件或编程接口来实现的。
8. 末端执行器配置
末端执行器配置是MOVEIT流程图1中的一个重要步骤,它用于配置机器人的末端执行器参数,包括末端执行器类型、末端执行器速度等。在MOVEIT流程图1中,末端执行器配置是通过配置文件或编程接口来实现的。
9. ROS系统
ROS(Robot Operating System)是一个开源的机器人操作系统,提供了机器人的基础设施和工具。在MOVEIT流程图1中,ROS系统是机器人的基础设施,提供了机器人的操作系统和通信机制。
10. MOVEIT程序模块
MOVEIT程序模块是MOVEIT流程图1中的一个关键组件,它提供了机器人的运动规划和控制功能。在MOVEIT流程图1中,MOVEIT程序模块是通过配置文件或编程接口来实现的。
11. 目标点空间坐标读取
目标点空间坐标读取是MOVEIT流程图1中的一个重要步骤,它用于读取机器人的目标点空间坐标。在MOVEIT流程图1中,目标点空间坐标读取是通过ROS系统和MOVEIT程序模块来实现的。
12. 运动规划(基于KDL算法)
运动规划是MOVEIT流程图1中的一个关键步骤,它用于规划机器人的运动轨迹。在MOVEIT流程图1中,运动规划是基于KDL算法(Kinematics and Dynamics Library)来实现的。
13. 运动信息队列发布
运动信息队列发布是MOVEIT流程图1中的一个重要步骤,它用于发布机器人的运动信息队列。在MOVEIT流程图1中,运动信息队列发布是通过ROS系统和MOVEIT程序模块来实现的。
14. ActionServer端订阅封装数据
ActionServer端订阅封装数据是MOVEIT流程图1中的一个重要步骤,它用于订阅机器人的运动信息队列和封装数据。在MOVEIT流程图1中,ActionServer端订阅封装数据是通过ROS系统和MOVEIT程序模块来实现的。
15. ROS多线程开启
ROS多线程开启是MOVEIT流程图1中的一个重要步骤,它用于开启机器人的多线程处理。在MOVEIT流程图1中,ROS多线程开启是通过ROS系统和MOVEIT程序模块来实现的。
16. 指定运动规划组模型建立
指定运动规划组模型建立是MOVEIT流程图1中的一个重要步骤,它用于建立机器人的运动规划组模型。在MOVEIT流程图1中,指定运动规划组模型建立是通过配置文件或编程接口来实现的。
17. MOVEIT配置
MOVEIT配置是MOVEIT流程图1中的一个重要步骤,它用于配置机器人的MOVEIT参数,包括运动规划参数、关节组参数、末端执行器参数等。在MOVEIT流程图1中,MOVEIT配置是通过配置文件或编程接口来实现的。
开始
Solidworks建立3D模
型
sw2urdf插件
URDF模型文件
碰撞检测配置 运动规划关节组配置 初始化位置设置 末端执行器配置
ROS
系
统
MOVEIT
程
序
模
块
目标点空间坐标读取
运动规划(基于KDL算法)
运动信息队列发布
ActionServer端订阅封装
数据并再发布
结束
ROS多线程开启
指定运动规划组
模
型
建
立
MOVEIT配置
下载后可阅读完整内容,剩余0页未读,立即下载
资源评论


食色也
- 粉丝: 38
- 资源: 351









最新资源
- 15×10 4 m3原油储罐焊接施工中的质量监控——白沙湾原油商业储备基地工程储罐施工- .pdf
- 14开孔焊接空心球节点承载能力试验研究与应用.pdf
- 15CrMoR(H)+SUS321不锈复合钢板的焊接 - .pdf
- 15CrMo低合金钢焊接技术总结.pdf
- 15CrMoR钢的焊接工艺.pdf
- 15CrMo钢厚壁高压管现场焊接的工艺措施.pdf
- 15CrMo与0Cr19Ni9焊接工艺 - .pdf
- 15MnNbR球罐组焊裂纹分析与焊接质量控制.pdf
- 15G909-1 钢结构连接施工图示(焊接连接).pdf
- 15MnNiNbDR乙烯球罐的焊接施工.pdf
- 15万m3大型钢制储油罐底板焊接.pdf
- 16MnDR薄板埋弧焊焊接 - .pdf
- 16MnDR埋弧焊焊接材料的选配.pdf
- 15Mo3钢的焊接.pdf
- 15MnNrR钢制2000m3液化气球罐的焊接试验.pdf
- 16MnR+0Cr13复合钢板焊接工艺.pdf
