
YOLOv3 论文笔记
1、解决什么问题
多尺度预测 (类 FPN)
更好的基础分类网络(类 ResNet)和分类器
2、使用什么方法
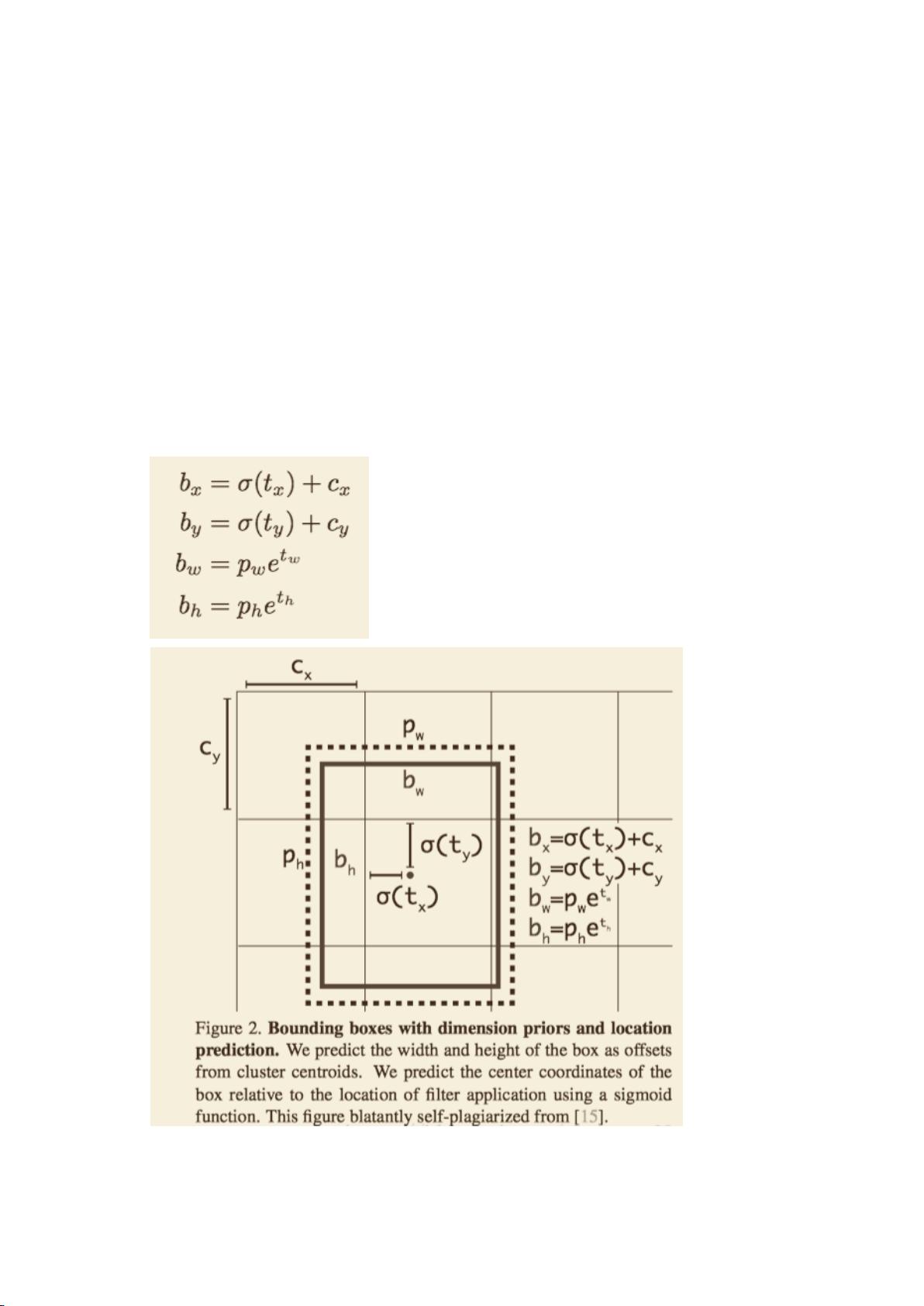
- bounding box 预测
使用维度聚类(dimension cluster)作为 anchor box 来预测边界框(bounding box)。
每个边界框 4 个参数(tx,ty,tw,th),如果边界框相对于图片左上角偏移(cx,cy)并且前面的
边界框(bounding box prior?边界框先验?)大小为(pw, ph),那么对边界框的位置的预测
为:
loss 使用的是均方误差(squared error);
使用逻辑回归预测每个边框里面对象的分数,若某个边界框与真实值的相似度大于别的边界

人亲卓玛
- 粉丝: 37
- 资源: 329









最新资源
- Spring Cloud商城项目专栏 049 支付
- sensors-18-03721.pdf
- Facebook.apk
- 推荐一款JTools的call-this-method插件
- json的合法基色来自红包东i请各位
- 项目采用YOLO V4算法模型进行目标检测,使用Deep SORT目标跟踪算法 .zip
- 针对实时视频流和静态图像实现的对象检测和跟踪算法 .zip
- 部署 yolox 算法使用 deepstream.zip
- 基于webmagic、springboot和mybatis的MagicToe Java爬虫设计源码
- 通过实时流协议 (RTSP) 使用 Yolo、OpenCV 和 Python 进行深度学习的对象检测.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0