matlab大作业报告1
需积分: 0 197 浏览量
2022-08-08
23:22:50
上传
评论
收藏 405KB DOCX 举报


Matlab 大作业
徐可心 201820504011 控制科学与工程
欠驱动系统是控制数量小于自由度的一类非线性系统,因其结构简单、能耗
低、硬件成本低等优点,在航天航空、机器人等领域被广泛应用。具有旋转激励
的平移振荡器(Translational Oscillators with Rotating Actuator,简称 TORA)作为其
中一种典型的欠驱动系统,该模型原本作为双自旋航天器的简化模型用来研究共
振现象,其组成结构包括一个不可直接驱动的平移振荡小车和一个可直接驱动的
旋转小球。本次报告的控制目标是运用模糊控制,实现对 TORA 系统的轨迹跟
踪,考虑了有摩擦和无摩擦的两种情况,并且检测了加入外界干扰时系统的控制
特性。除此之外,本次报告还结合了神经网络,使神经网络仿真的曲线逼近系统
的角度变化曲线。
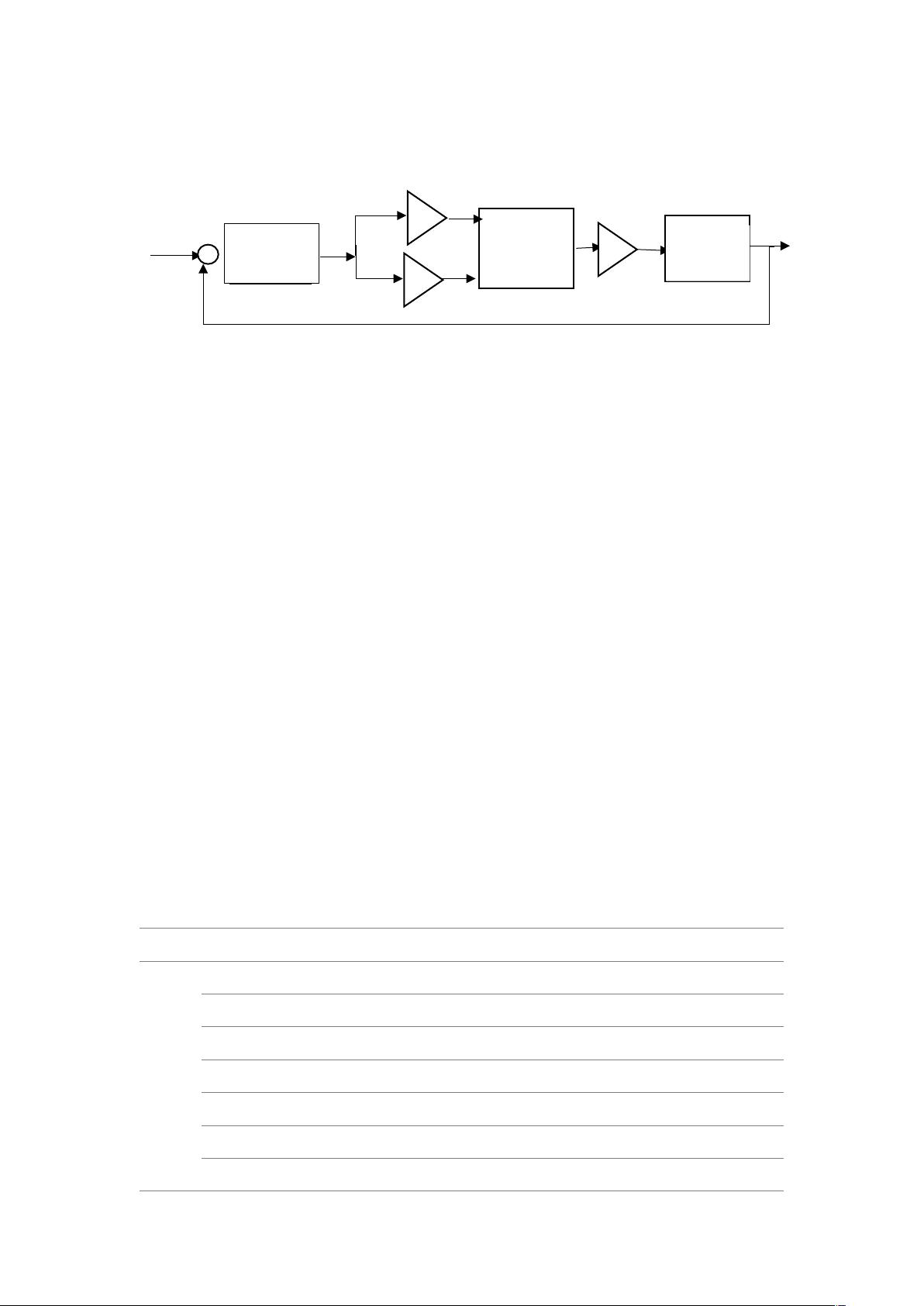
1,TORA 系统的动态模型
图 1-1 TORA 系统的动态模型
TORA 系统的动力学方程如下所示:
2
) ( cos sin ) 0M m x me kx
q q q q
+ + - + =
&& &
&&
(
cos ( )mex me I T
q q
+ + =
&&
&&
其中,小车的质量为
M
,弹簧的弹性系数为
k
;可驱动小球的质量为
m
,关于
质心的转动惯量为
I
,质心距离旋转轴的距离为
e
;
( )x t
、
( )x t
&
分别代表小车偏
离平衡点的水平位移和速度;以小球逆时针偏离竖直方向为正方向,
( )t
q
、
( )t
q
&
分别代表旋转小球旋转角度、角速度;
( )x t
&&
、
( )t
q
&&
分别表示小车的加速度和可驱
k
M
N
q
m
e
I

剩余11页未读,继续阅读













评论0