在IT领域,特别是计算机视觉和机器人定位导航中,"标定"和"IMU-kinfu融合"是两个关键的概念。这里的"标定"通常指的是摄像头校准,目的是消除摄像头固有的几何失真,提高图像处理的精度。而"IMU-kinfu融合"涉及到惯性测量单元(IMU)数据与三维重建技术(如KinectFusion,简称kinfu)的结合,用于提升运动物体的定位和跟踪性能。
1. **摄像头标定**:摄像头标定是一个数学过程,通过拍摄已知几何形状(如棋盘格)的多个视角图像,计算出摄像头的内参矩阵和畸变系数。这些参数可以帮助矫正图像中的透视变形和径向畸变,使得图像中的直线在现实世界中仍然是直线,这对于3D重建和物体追踪至关重要。
2. **IMU(惯性测量单元)**:IMU是一种传感器,可以测量加速度和角速度,提供物体的动态运动信息。然而,由于漂移问题,单独的IMU数据不能长时间精确地确定位置。这就需要与其他传感器,如摄像头,进行数据融合。
3. **cv-solvePnP**:这是OpenCV库中的一个函数,用于解决透视-n-点(PNP)问题,即根据特征点在二维图像上的投影和对应的三维世界坐标,估计摄像头的位置和姿态。描述中提到的"同组数据时好时坏"可能是因为特征点匹配的质量不稳定,或者摄像头的运动过于剧烈导致。
4. **IMU-kinfu融合**:KinectFusion是一种实时的3D环境重建和导航方法,利用RGB-D摄像头的数据。结合IMU数据,可以增强kinfu的鲁棒性和准确性,尤其是在快速运动或光照变化条件下。"imu 漂移"指的是IMU长时间使用后累积的误差,而"平滑性"则指kinfu在处理快速移动时可能出现的锯齿状输出,可能由于运动模糊导致特征点检测困难,从而影响跟踪。
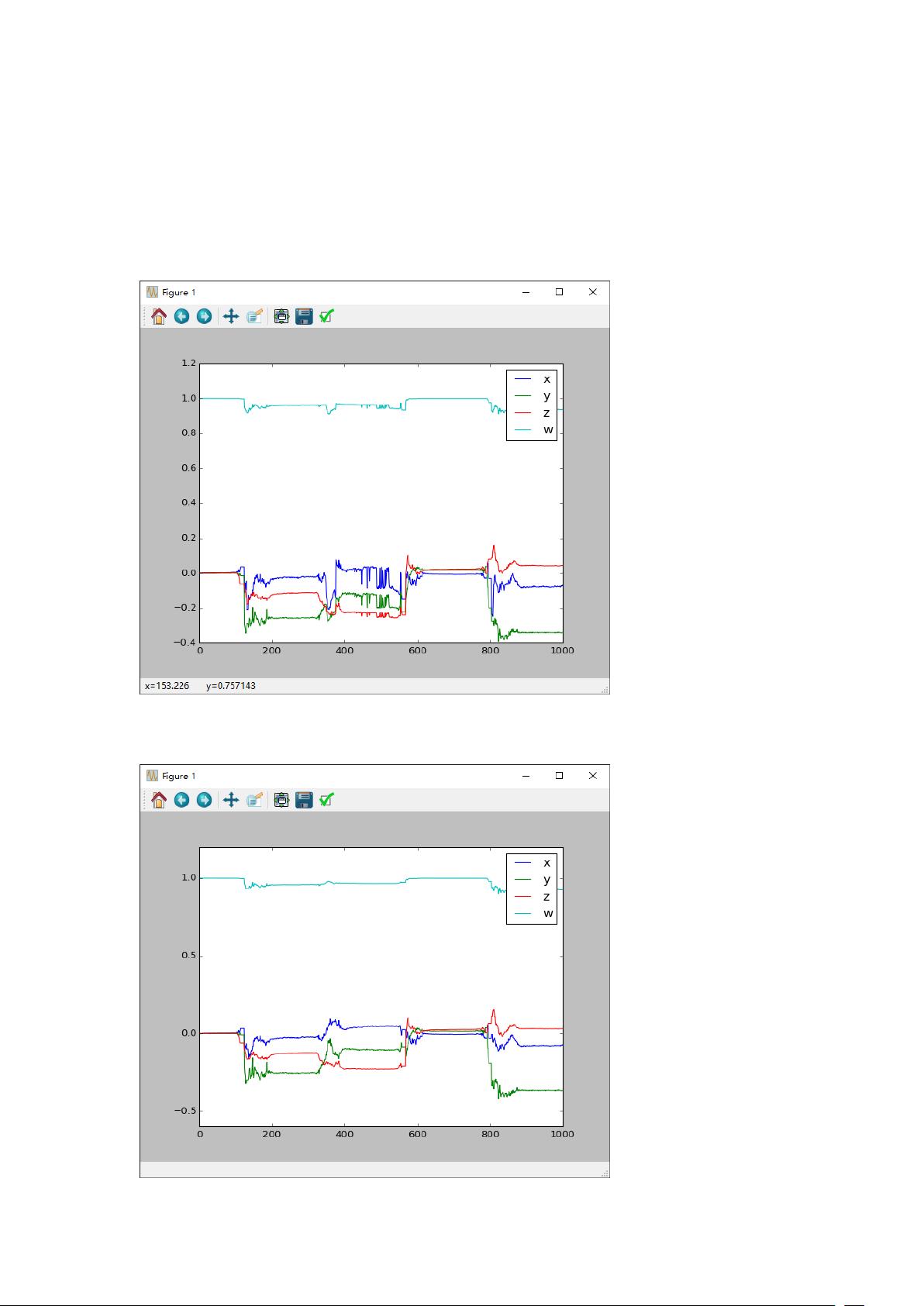
5. **稳定性对比**:将cv-solvePnP的结果与IMU数据(XB'X'可能表示IMU的校正或滤波输出)一起比较,是为了评估两种方法在不同条件下的稳定性。这有助于识别哪种方法在特定场景下更适合,或者如何结合两者以获得最佳效果。
6. **数据点(466, 569, 577, 755, 154569, 577755)**:这些可能是时间戳或其他数据序列号,用于跟踪和分析不同时刻的状态。它们可能关联到特定的图像帧或IMU读数,用于分析性能变化。
这个话题涉及了从摄像头标定到多传感器融合的一系列复杂技术,这些技术在机器人、自动驾驶、无人机等领域有着广泛的应用。通过深入理解和优化这些过程,可以极大地提升系统的定位和导航能力。














评论0