A Robust and Easy to Implement Method for
IMU Calibration without External Equipments
Simulation Results
David Tedaldi, Alberto Pretto and Emanuele Menegatti
15/09/2013
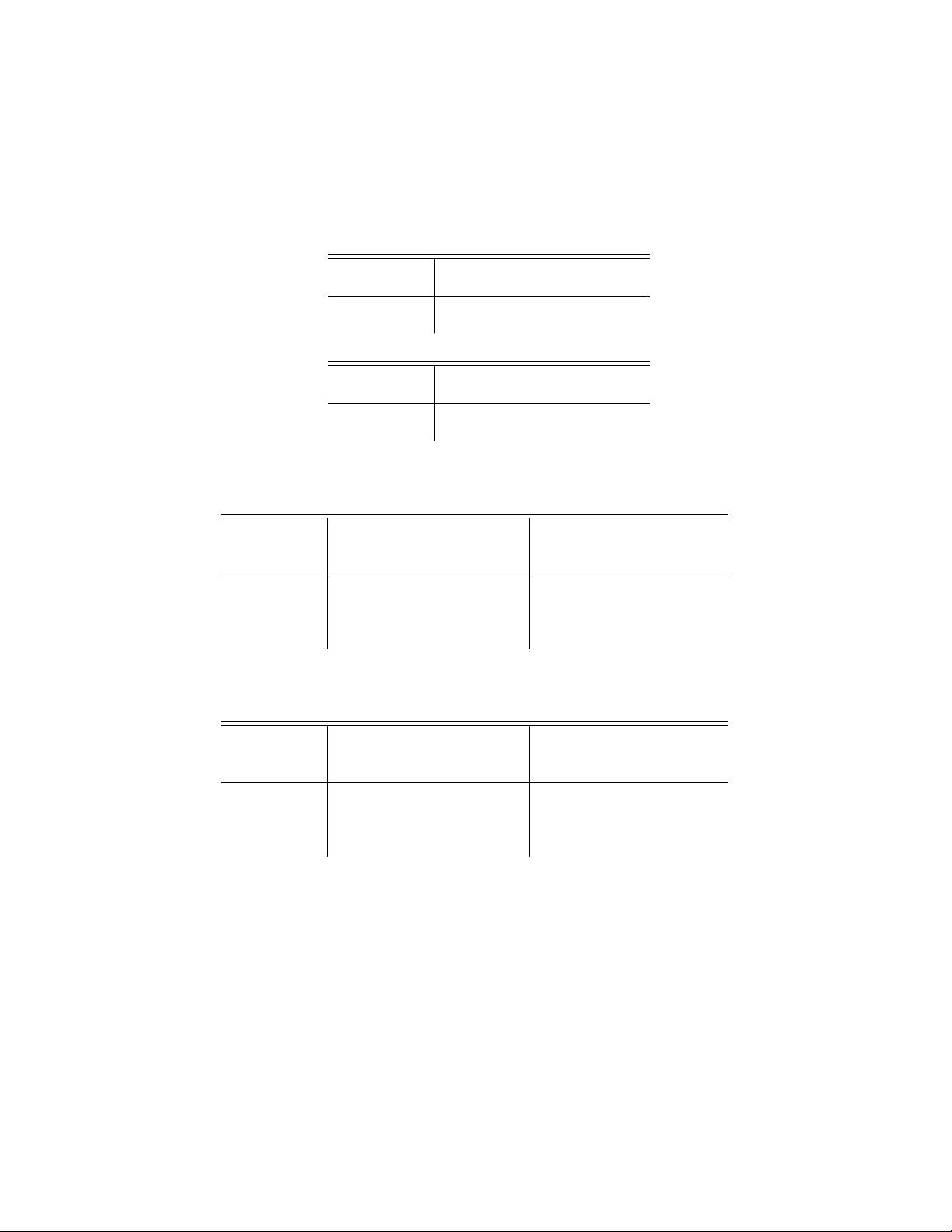
Table 1: Accelerometers Parameters. Set:1.
Real Mean RSM Mean Erorr RSM Worst
Value x10
−3
x10
−3
x10
−3
case
α
y z
0.0049 0.0049 0.0481 0.0398 0.0275 0.0049
α
zy
-0.0055 -0.0055 0.0401 0.0334 0.0214 -0.0055
α
zx
0.0079 0.0079 0.0296 0.0248 0.0190 0.0079
s
a
x
0.9908 0.9908 0.0327 0.0265 0.0191 0.9908
s
a
y
1.0068 1.0068 0.0304 0.0258 0.0199 1.0068
s
a
z
1.0066 1.0066 0.0215 0.0178 0.0151 1.0066
b
a
x
0.0793 0.0793 0.1369 0.1163 0.0819 0.0792
b
a
y
-0.0024 -0.0024 0.2138 0.1760 0.1178 -0.0026
b
a
z
0.0636 0.0636 0.1332 0.0953 0.0919 0.0636
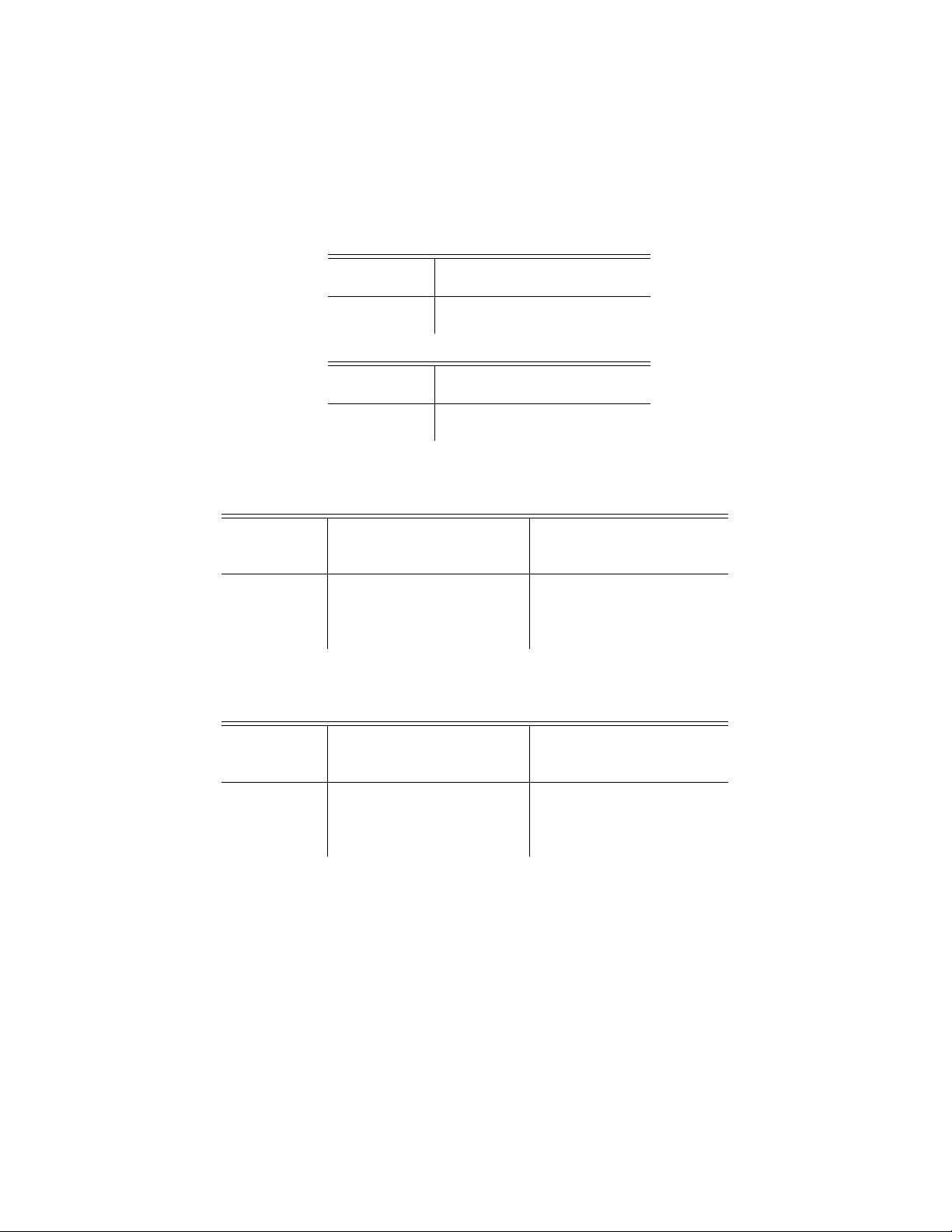
Table 2: Gyroscope Parameters. Set:1.
Real Mean RSM Mean Erorr RSM Worst
Value x10
−3
x10
−3
x10
−3
case
γ
y z
0.0112 0.0110 0.8547 0.6392 0.5920 0.0099
γ
zy
-0.0211 -0.0210 0.4419 0.3468 0.2669 -0.0207
γ
xz
0.0040 0.0039 1.0630 0.9080 0.5266 0.0030
γ
zx
-0.0010 -0.0011 0.4102 0.3386 0.2302 -0.0011
γ
xy
0.0270 0.0270 0.8154 0.6375 0.4944 0.0252
γ
y x
0.0151 0.0155 0.7250 0.7315 0.3958 0.0166
s
g
x
0.8786 0.8785 0.4121 0.3366 0.2299 0.8790
s
g
y
0.9703 0.9704 0.4059 0.3353 0.2237 0.9701
s
g
z
1.0460 1.0460 0.4216 0.3410 0.2397 1.0460
1