SqueezeSeg-中文翻译1

需积分: 0 39 浏览量
更新于2022-08-04
收藏 1.74MB PDF 举报
“SqueezeSeg:使用卷积神经网络和条件随机场实现实时道路目标分割”
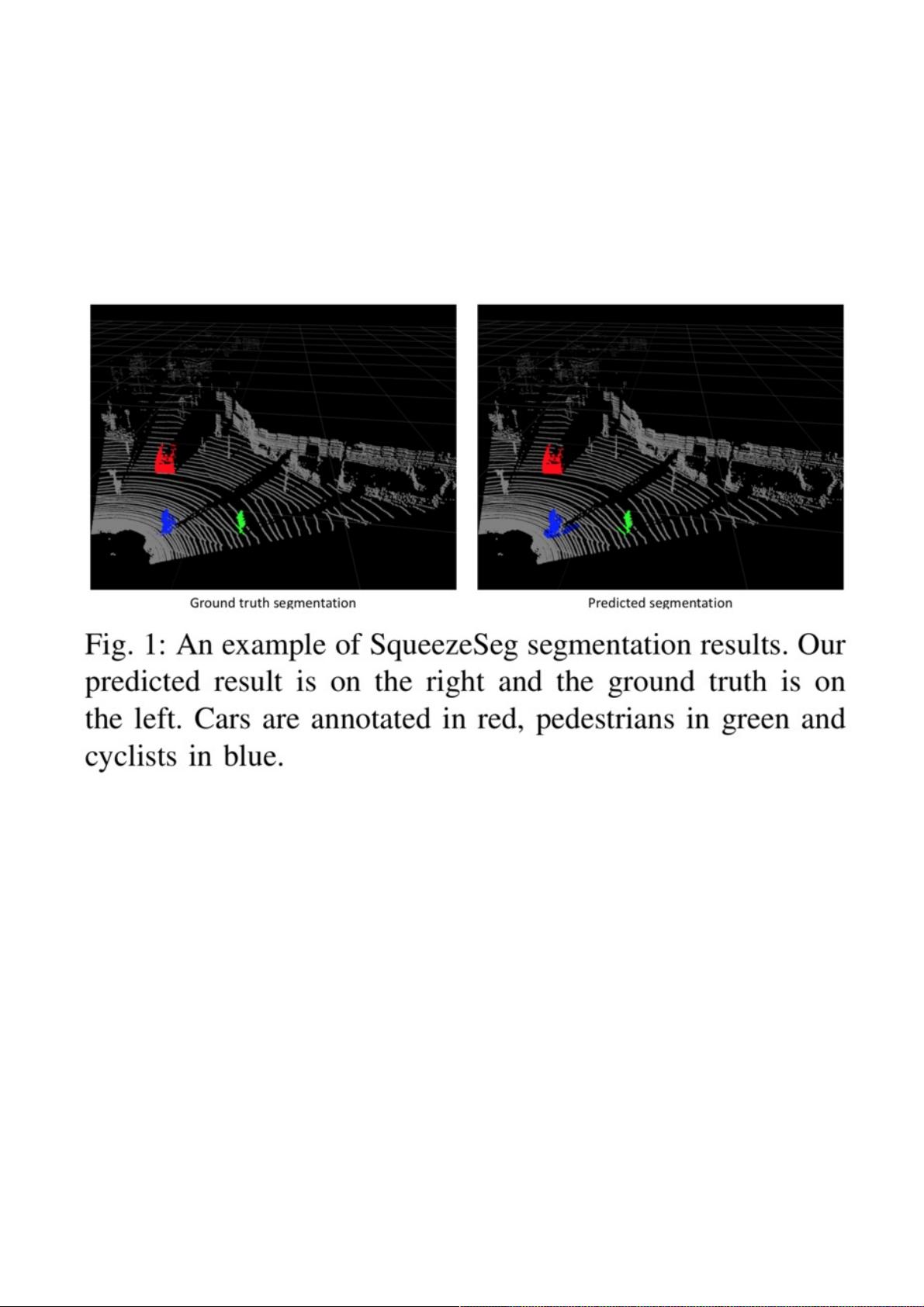
SqueezeSeg是一种基于卷积神经网络(CNN)和条件随机场(CRF)的端到端管道,旨在实现实时道路目标分割。该方法可以对三维激光雷达点云进行语义分割,检测和分类感兴趣的实例,例如汽车、行人和骑自行车的人。
在该方法中,首先将三维激光雷达点云转换为密集的2D网格表示,然后使用CNN模型来提取特征并输出标签点地图。接着,使用CRF模型来进一步细化标签点地图,并使用传统的聚类算法来获取实例级标签。
SqueezeSeg的优点在于它可以实现实时道路目标分割,具有很高的精度和稳定性。该方法可以应用于自动驾驶系统,帮助汽车精确地分类和定位道路目标。
该方法的创新之处在于它使用了深度学习来提取特征,避免了迭代算法的不稳定性和复杂性。同时,该方法也可以使用传统的聚类算法来获取实例级标签,提高了模型的鲁棒性。
SqueezeSeg的应用前景广阔,可以应用于自动驾驶、智能交通、机器人等领域。该方法的开源代码和合成数据将有助于推动相关领域的研究和发展。
SqueezeSeg的技术细节:
1. 输入:三维激光雷达点云
2. 数据预处理:将三维激光雷达点云转换为密集的2D网格表示
3. 特征提取:使用CNN模型来提取特征
4. 标签点地图生成:使用CRF模型来生成标签点地图
5. 实例级标签获取:使用传统的聚类算法来获取实例级标签
6. 输出:道路目标的实例级标签
SqueezeSeg的技术优势:
1. 实时性:SqueezeSeg可以实现实时道路目标分割
2. 精度:SqueezeSeg具有很高的精度和稳定性
3.鲁棒性:SqueezeSeg可以使用传统的聚类算法来获取实例级标签,提高了模型的鲁棒性
4.通用性:SqueezeSeg可以应用于自动驾驶、智能交通、机器人等领域
SqueezeSeg是一种基于深度学习的实时道路目标分割方法,具有很高的精度和稳定性。该方法可以应用于自动驾驶系统,帮助汽车精确地分类和定位道路目标。
SqueezeSeg: Convolutional Neural Nets with
Recurrent CRF for Real-Time Road-Object
Segmentation from 3D LiDAR Point Cloud
translation
https://arxiv.org/abs/1710.07368
SqueezeSeg代码地址:SqueezeSeg: Convolutional Neural Nets with Recurrent CRF for
Real-Time Road-Object Segmentation from 3D LiDAR Point Cloud
摘要
在本文中,我们从三维激光雷达点云的角度对道路目标进行了语义分割。我们特别希望检测和
分类感兴趣的实例,例如汽车、行人和骑自行车的人。我们制定这个问题作为一个逐点分类的
问题,并提出一个端到端的管道称为SqueezeSeg基于卷积神经网络(CNN):CNN需要改变激光
雷达点云直接输出作为输入,并逐点地标签地图,然后精制的条件随机场(CRF)实现为复发性层。
然后用传统的聚类算法得到实例级的标签。我们的CNN模型是在来自KITTI1数据集的激光雷达
点云上训练的,我们的逐点分割标签来自于KITTI的3D边框。为了获得额外的训练数据,我们
在广受欢迎的视频游戏《侠盗飞车V》(GTA-V)中构建了一个激光雷达模拟器,以合成大量真
实的训练数据。我们的实验表明,SqueezeSeg以惊人的快速和稳定性,每帧(8.7±0.5)ms的高
精度运行,高度可取的自主驾驶的应用程序。此外,对综合数据的训练可以提高对真实数据的验
证准确性。我们的源代码和合成数据将是开源的。
1.介绍
自动驾驶系统依赖于对环境的准确、实时和鲁棒的感知。自动驾驶汽车需要精确地分类和定
位“道路物体”,我们将其定义为与驾驶有关的物体,如汽车、行人、自行车和其他障碍物。
不同的自动驾驶解决方案可能有不同的传感器组合,但3D激光雷达扫描仪是最普遍的组件之
一。激光雷达扫描仪直接产生环境的距离测量,然后由车辆控制器和计划人员使用。此外,激

剩余15页未读,继续阅读
156 浏览量
198 浏览量
175 浏览量
120 浏览量
2022-08-04 上传
173 浏览量
2022-08-04 上传
176 浏览量
2022-08-04 上传
2022-07-25 上传
2022-08-04 上传
2021-01-20 上传
114 浏览量
162 浏览量
136 浏览量
200 浏览量
资源评论


周林深
- 粉丝: 57
- 资源: 290









最新资源
- EfficientDet.pdf
- DINOv2.pdf
- 基于粒子群优化算法的永磁同步电机PMSM参数辨识 关键词:永磁同步电机 粒子群优化算法 参数辨识 ① 粒子群迭代 ②更新速度并对速度进行边界处理 ③更新位置并对位置进行边界处理 ④进行自适应变异 ⑤进
- EfficientViT.pdf
- From Images to Textual Prompts.pdf
- Emerging Properties in Self-Supervised Vision Transformers.pdf
- IMAGE BERT PRE-TRAINING WITH ONLINE.pdf
- Reinforced Multi-Teacher Selection for Knowledge Distillation.pdf
- PyTorch.pdf
- Temporal Graph Neural Networks.pdf
- transformer.pdf
- Ecode步骤条(E9)
- 四轴龙门桁架机械手sw20全套技术资料100%好用.zip
- SAM.pdf
- 2-911投屏工具1.0.0.5
- Transformer在视觉中的应用VIT算法.pdf
