
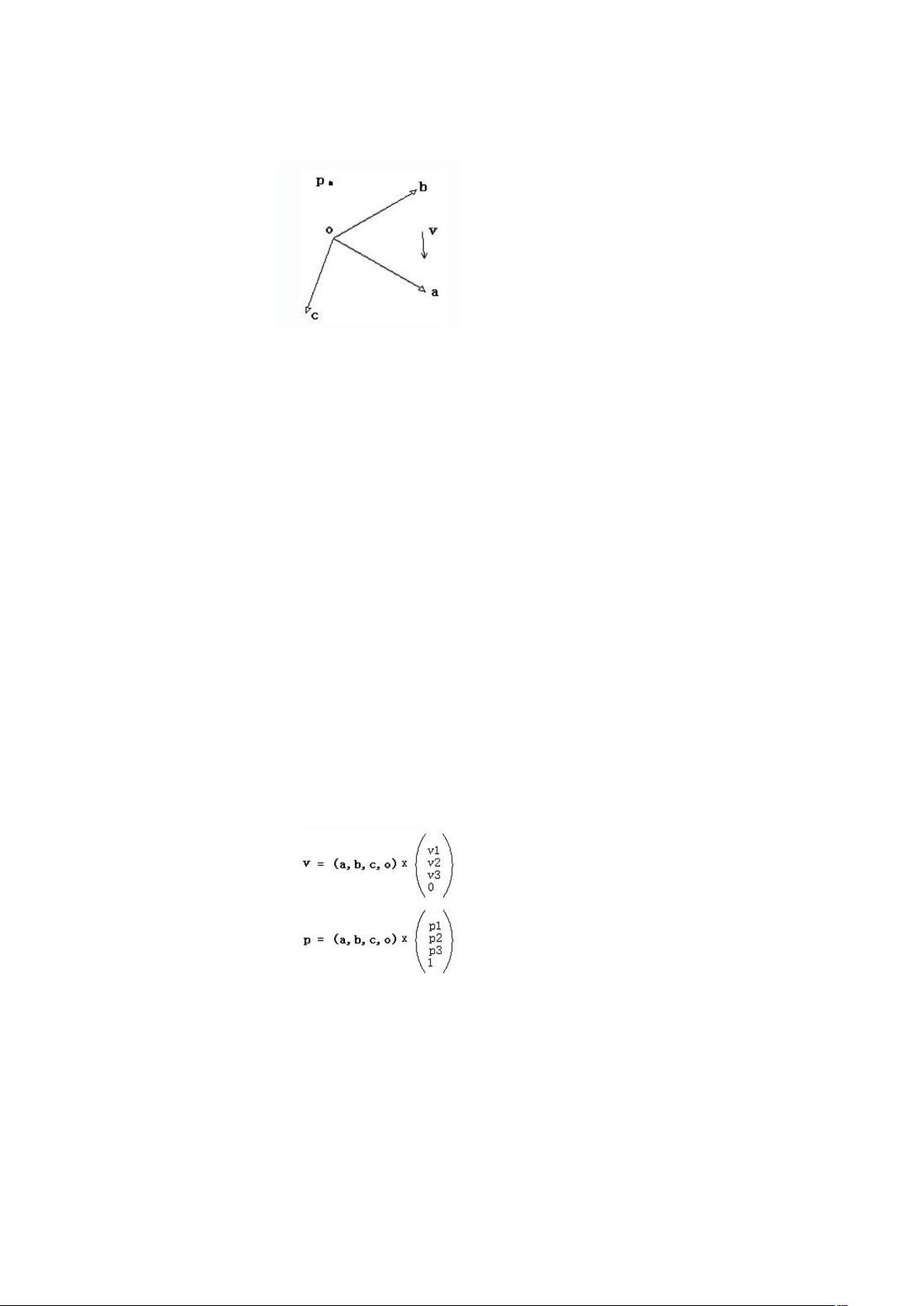
对于一个向量 v、点 P 以及基 oabc 如下图:
可以找到一组坐标(v1,v2,v3),使得
v = v1a + v2b + v3c (1)
而对于一个点 P,则可以找到一组坐标(p1,p2,p3),使得
p - o = p1a + p2b + p3c (2)
从上面对向量和点的表达,我们可以看出为了在坐标系中表示一个点(如 p),我们把点的
位置看作是对这个基的原点 o 所进行的一个位移,即一个向量—— p–o(有的书中把这样
的向量叫做位置向量——起始于坐标原点的特殊向量)。
我们在表达这个向量的同时用等价的方式表达出了点 P:
p = o + p1a + p2b + p3c (3)
(1) (3)是坐标系下表达一个向量和点的不同表达方式。这里可以看出,虽然都是用代数分量
的形式表达向量和点,但表达一个点比一个向量需要额外的信息。
问题在于:如果我写出一个代数分量表达(1, 4, 7),谁知道它是个向量还是个点!
我们现在把(1)(3)写成矩阵的形式:
这里(a,b,c,o)是坐标基矩阵,右边的列向量分别是向量 v 和点 P 在基下的坐标。
这样,向量和点在同一个基下就有了不同的表达:3D 向量的第 4 个代数分量是 0,而 3D 点
的第 4 个代数分量是 1。像这种这种用 4 个代数分量表示 3D 几何概念的方式是一种齐次坐
标表示(n 维的向量用一个 n+1 维向量来表示)。
“齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)
几何变换。”——
F.S. Hill, JR
资源评论


黄涵奕
- 粉丝: 880
- 资源: 327









最新资源
- 适用于 Python 3 的 Django LDAP 用户身份验证后端 .zip
- 基于PBL-CDIO的材料成型及控制工程课程设计实践与改革
- JQuerymobilea4中文手册CHM版最新版本
- 适用于 Python 2 和 3 以及 PyPy (ws4py 0.5.1) 的 WebSocket 客户端和服务器库.zip
- 适用于 AWS 的 Python 无服务器微框架.zip
- 适用于 Apache Cassandra 的 DataStax Python 驱动程序.zip
- WebAPI-案例-年会抽奖.html
- 这里有一些基础问题和一些棘手问题的解答 还有hackerrank,hackerearth,codechef问题的解答 .zip
- Jqueryeasyui网络教程中文最新版本
- 英汉双解字典(数据结构课程设计)代码.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


