
.
.
. .jz.
机器人避障问题的解题分析
摘要:本文对 2012 年全国大学生数学建模竞赛 D 题机器人避障问题进展了全面分析,对最短路的设计进
展了理论分析和证明,建立了机器人避障最短路径的几何模型,对最短时间路径问题通过建立非线性规划
模型,有效地解决了转弯半径、圆弧圆心位置和行走时间等问题。
关键词:机器人避障;最短路径;Dijkstra 算法;几何模型;非线性规划模型
1 引言
随着科学技术的进步和计算机技术的开展,机器人的应用越来越广泛,在机器人的应
用中如何使机器人在其工作范围内为完成一项特定的任务寻找一条平安高效的行走路径,是
人工智能领域的一个重要问题。本文主要针对在一个场景中的各种静态障碍物,研究机器人
绕过障碍物到达指定目的地的最短路径问题和最短时间问题。
本文以 2012 年“高教社〞杯全国大学生数学建模竞赛 D 题“机器人避障问题〞为例进展
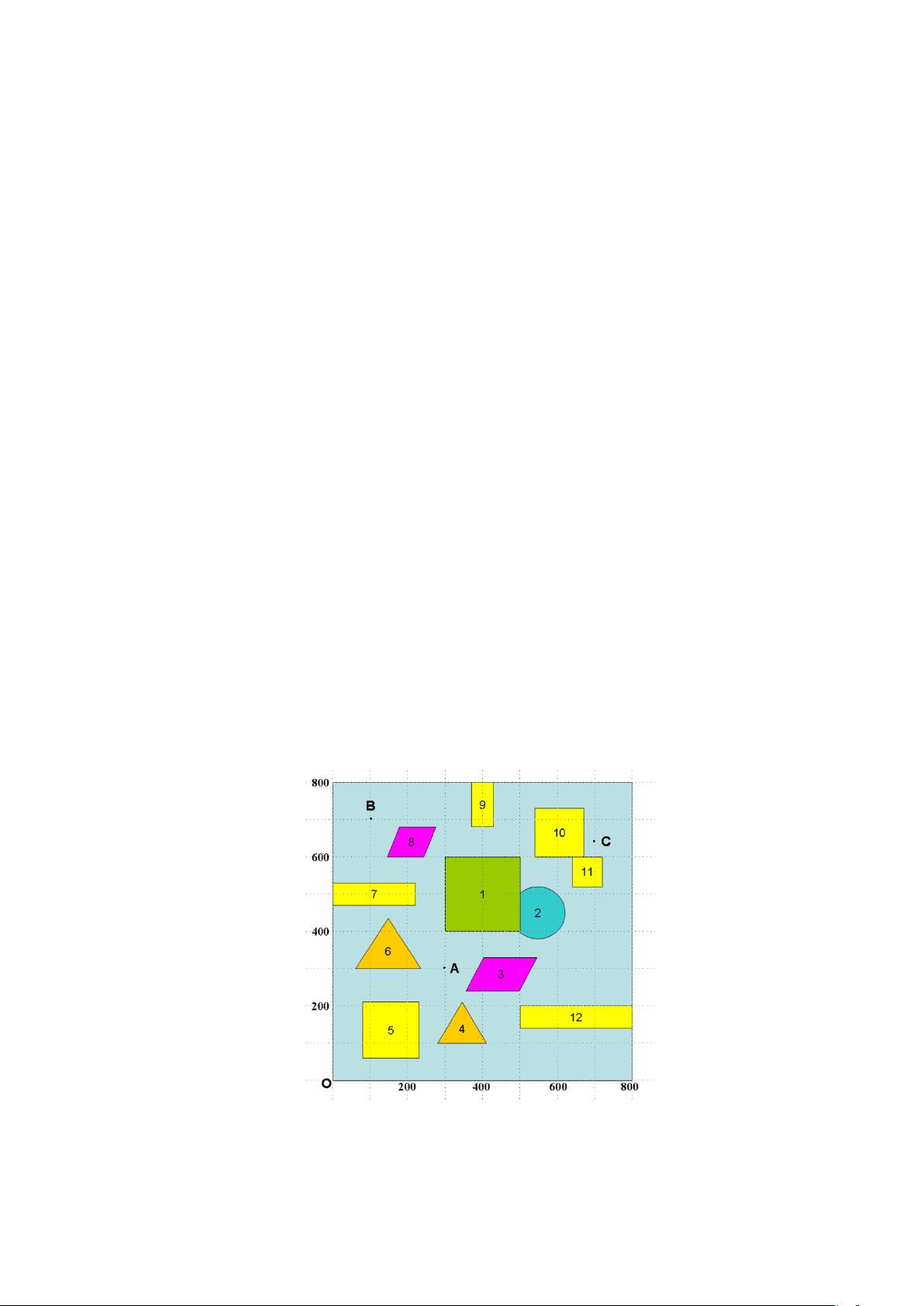
研究。假设机器人的工作范围为 800×800 的平面正方形区域〔如图 1〕,其中有 12 个不同
形状的静态障碍物,障碍物的数学描述〔如表 1〕:
图 1 800×800 平面场景图
剩余33页未读,继续阅读
资源评论













