

SLAM 简介
1. 关于 SLAM
SLAM 是同步定位与地图构建(Simultaneous Localization And Mapping)的缩
写,最早由 Hugh Durrant-Whyte 和 John J.Leonard 提出。SLAM 主要用于解决移
动机器人在未知环境中运行时定位导航与地图构建的问题。
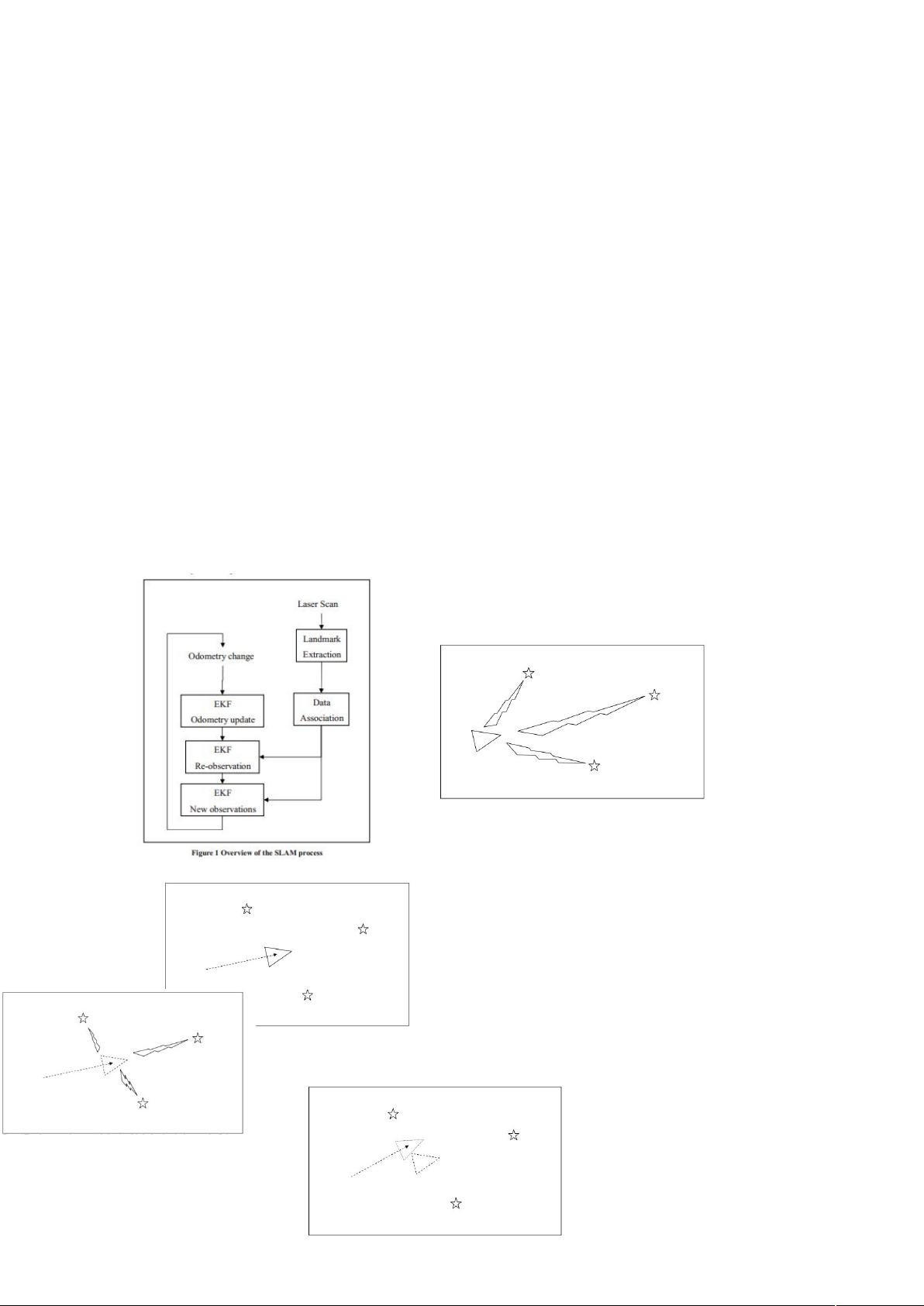
SLAM 通常包括如下几个部分,特征提取,数据关联,状态估计,状态更新以及
特征更新等。对于其中每个部分,均存在多种方法。针对每个部分,我们将详细解释
其中一种方法。在实际使用过程中,读者可以使用其他的方法代替本文中说明的方法。
这里,我们以室内环境中运行的移动机器人为例进行说明,读者可以将本文提出的方
法应用于其他的环境以及机器人中。
SLAM 既可以用于 2D 运动领域,也可以应用于 3D 运动领域。这里,我们将仅讨
论 2D 领域内的运动。
2. 机器人平台
在学习 SLAM 的过程中,机器人平台是很重要的,其中,机器人平台需要可以移
动并且至少包含一个测距单元。我们这里主要讨论的是室内轮式机器人,同时主要讨
论 SLAM 的算法实现过程,而并不考虑一些复杂的运动模型如人形机器人。
在选择机器人平台时需要考虑的主要因素包括易用性,定位性能以及价格。定位
性能主要衡量机器人仅根据自身的运动对自身位置进行估计的能力。机器人的定位精
度应该不超过 2%,转向精度不应该超过 5%。一般而言,机器人可以在直角坐标系中
根据自身的运动估计其自身的位置与转向。
从 0 开始搭建机器人平台将会是一个耗时的过程,也是没有必要的。我们可以选
择一些市场上成熟的机器人开发平台进行我们的开发。这里,我们以一个非常简单的
自己开发的机器人开发平台讨论,读者可以选择自己的机器人开发平台。
目前比较常见的测距单元包括激光测距、超声波测距、图像测距。
其中,激光测距是最为常用的方式。通常激光测距单元比较精确、高效并且其输
出不需要太多的处理。其缺点在于价格一般比较昂贵(目前已经有一些价格比较便宜
的激光测距单元)。激光测距单元的另外一个问题是其穿过玻璃平面的问题。另外激
光测距单元不能够应用于水下测量。
另外一个常用的测距方式是超声波测距。超生波测距以及声波测距等以及在过去
得到十分广泛的应用。相对于激光测距单元,其价格比较便宜;但其测量精度较低。
激光测距单元的发射角仅 0.25°,因而,激光基本上可以看作直线;相对而言,超声
波的发射角达到了 30°,因而,其测量精度较差。但在水下,由于其穿透力较强,因
而,是最为常用的测距方式。最为常用的超声波测距单元是 Polaroid 超声波发生器。
第三种常用的测距方式是通过视觉进行测距。传统上来说,通过视觉进行测距需
要大量的计算,并且测量结果容易随着光线变化而发生变化。如果机器人运行在光线
较暗的房间内,那么视觉测距方法基本上不能使用。但最近几年,已经存在一些解决
上述问题的方法。一般而言,视觉测距一般使用双目视觉或者三目视觉方法进行测距。
剩余11页未读,继续阅读
资源评论


wangwenw
- 粉丝: 0
- 资源: 4









最新资源
- 用于检测网络物理系统重放攻击的动态加密解密方案
- 一套简单好用开源免费的Java CMS内容管理系统/一整套优质的开源生态内容体系/基于SpringBoot2/前端Vue3/element plus/提供上百套模板,同时提供实用的插件/
- 两级式单相光伏并网仿真(注意版本matlab 2021a) 前级采用DC-DC变电路,通过MPPT控制DC-DC电路的pwm波来实现最大功率跟踪,mppt采用扰动观察法,后级采用桥式逆变,用spwm波
- 基于springboot的教师工作量管理系统源码(java毕业设计完整源码+LW).zip
- 计算物理课程试题解析及其Matlab实现实例
- 适合小白入门的Fortran中文教程学习
- MATLAB代码:电力系统火电机组组合,遗传算法求解,考虑爬坡约束备用约束等,完美解决该类问题
- 基于springboot的小徐影城管理系统源码(java毕业设计完整源码+LW).zip
- 计算机网络命令与Wireshark数据分析实战
- 计算机网络实验:TCP和UDP协议的实现分析
- kotlin 语言基础学习《PDF文档》
- 基于springboot的学科竞赛管理源码(java毕业设计完整源码+LW).zip
- usb redirector,可以通过网络将windows的usb设备重定向到另一台主机,比如hyper-v这种不支持USB的虚拟机,或网络上的其它的主机
- 基于springboot的海滨体育馆管理系统的设计与实现源码(java毕业设计完整源码+LW).zip
- IoT DC3 是一个基于 Spring Cloud 的 100% 完全开源的、分布式的物联网(IoT)平台,用于快速开发物联网项目和管理物联设备,是一整套物联系统解决方案
- Object-C基础教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


