三、机器人驱动芯片 AS611
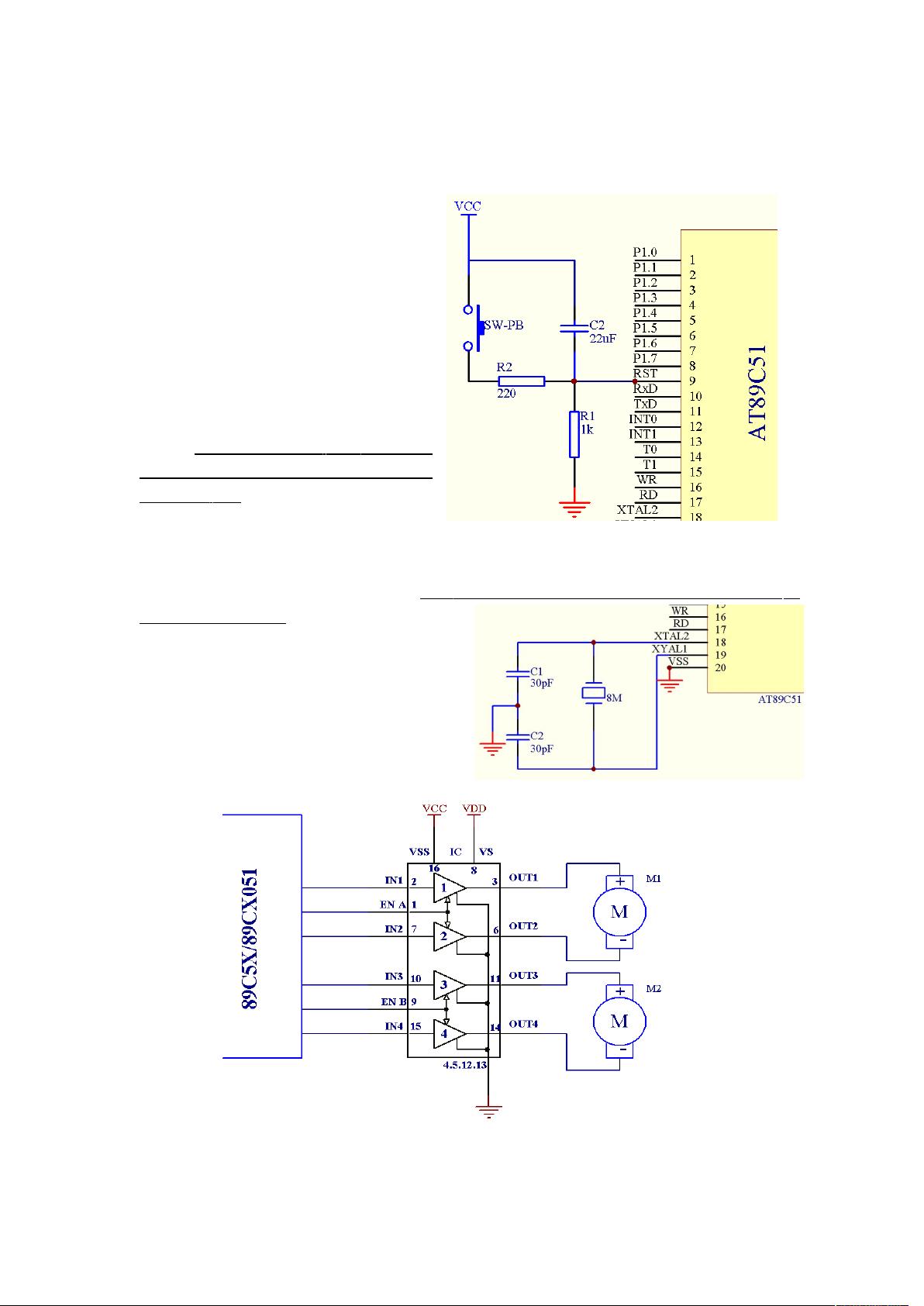
图 3 是机器人驱动芯片 AS611 与 51 单片机连接的电路原理图
AS611 内部包含 4 通道逻辑驱动电路,其额定工作电流为 1A,最大可达 1.5A,Vss 电
压最小 4.5V,最大可达 36V;Vs 电压最大值也是 36V。下表是其使能、输入引脚和输出引
脚的逻辑关系(电路按图 3 连接):
EN A(B) IN1(IN3) IN2(IN4) 电机运行情况
H H L
正转
H L H
反转
H
同 IN2(IN4) 同 IN1(IN3) 快速停止
L X X
停止
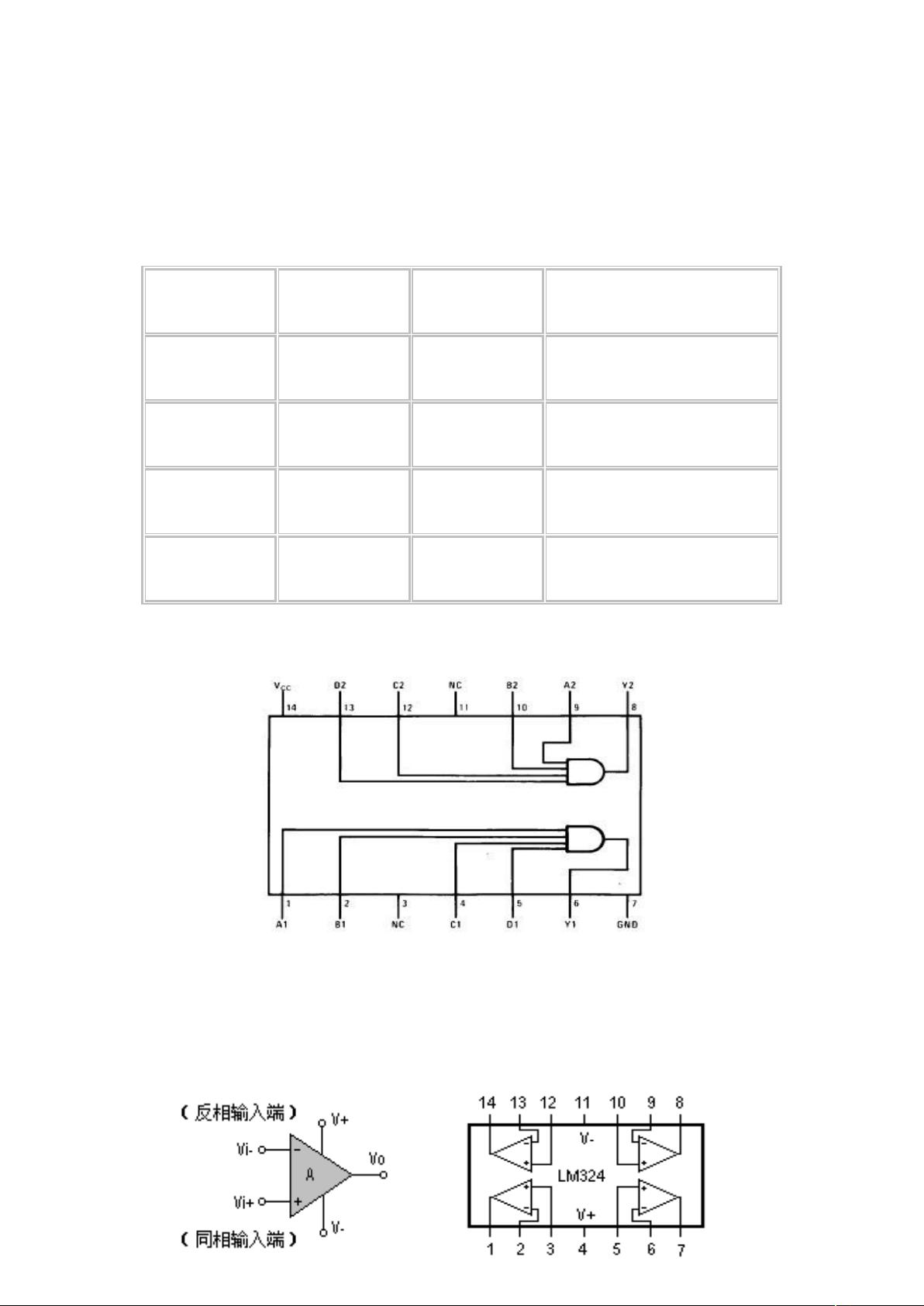
四、74LS21 四输入与门
74LS21 四输入与门引脚如图 4 所示。
五、LM324 四运放集成电路
LM324 是四运放集成电路,它采用 14 脚双列直插塑料封装。它的内部包含四组形式
完全相同的运算放大器,除电源共用外,四组运放相互独立。
图 4 74LS21 四输入与门引脚图
图 5 LM324 四运放的组成与引脚图