基于AT89C51单片机设计的简易智能机器人.docx
版权申诉
37 浏览量
2023-02-16
18:26:56
上传
评论
收藏 182KB DOCX 举报

基于 AT89C51 单片机设计的简易智能机器人
引言
随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以
在一块芯片上同时集成 CPU、存储器、定时器/计数器、并行和串行接口、看门
狗、前置放大器、A/D 转换器、D/A 转换器等多种电路,这就很容易将计算机
技术与测量控制技术结合,组成智能化测量控制系统。这种技术促使机器人技术
也有了突飞猛进的发展,目前人们已经完全可以设计并制造出具有某些特殊功能
的简易智能机器人。
1 设计思想与总体方案
1.1 简易智能机器人的设计思想
本机器人能在任意区域内沿引导线行走,自动绕障,在有光源引导的条件下能沿
光源行走。同时,能检测埋在地下的金属片,发出声光指示信息,并能实时存储、
显示检测到的断点数目以及各断点至起跑线间的距离,最后能停在指定地点,显
示出整个运行过程的时间。
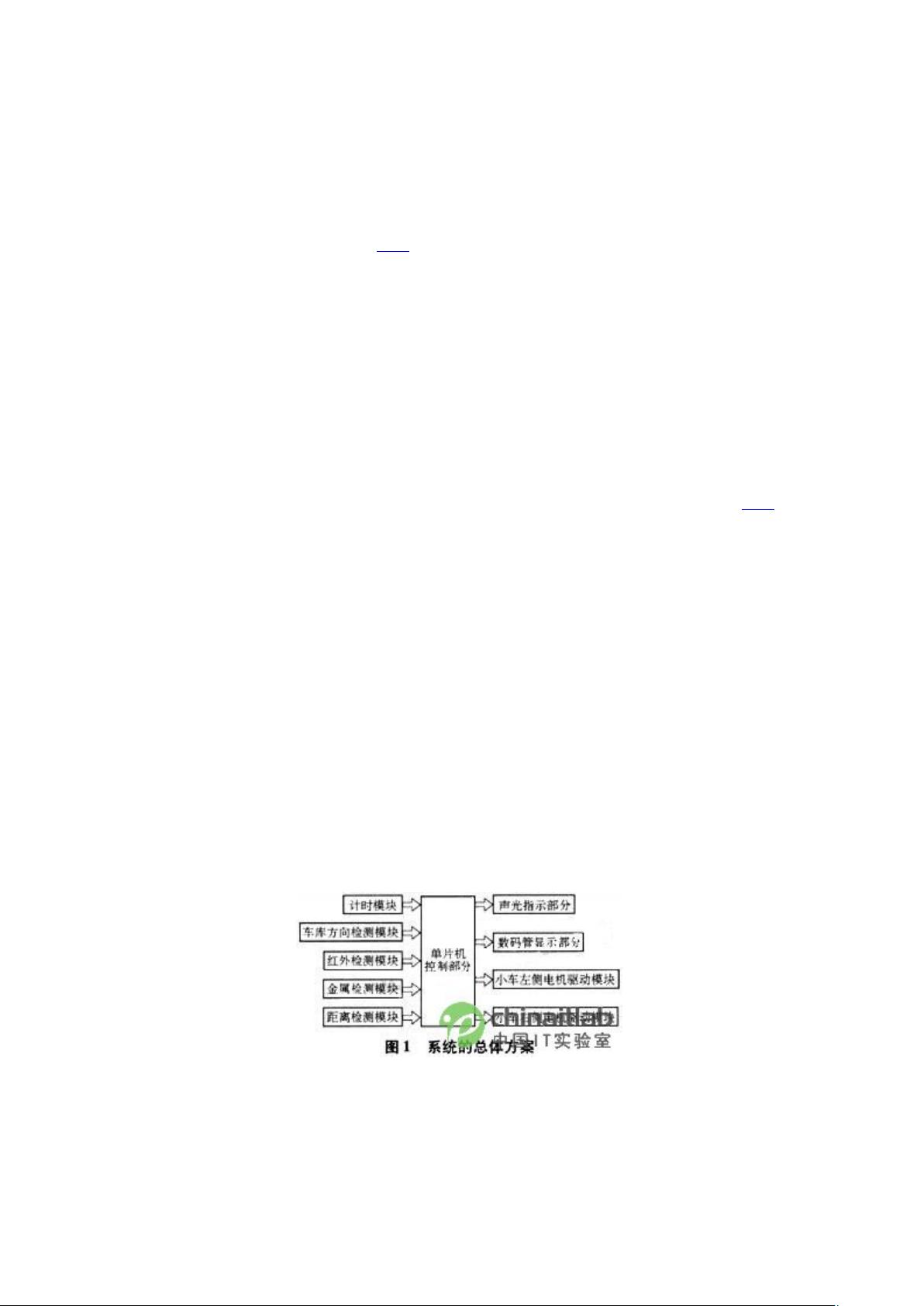
1.2 总体设计方案和框图
本设计以 AT89C5l 单片机作为检测和控制核心。采用红外光电传感器检测路面黑
线及障碍物,使用金属传感器检测路面下金属铁片,应用光电码盘测距,用光敏
电阻检测、判断车库位置,利用 PWM(脉宽调制)技术动态控制电动机的转动方向
和转速。通过软件编程实现机器人行进、绕障、停止的精确控制以及检测数据的
存储、显示。通过对电路的优化组合,可以最大限度地利用 51 单片机的全部资
源。
P0 口用于数码管显示,P1 口用于电动机的 PWM 驱动控制,P2,P3 口用于传感器
的数据采集与中断控制。这样做的优点是:充分利用了单片机的内部资源,降低
了总体设计的成本。该方案总体方案见图 1。
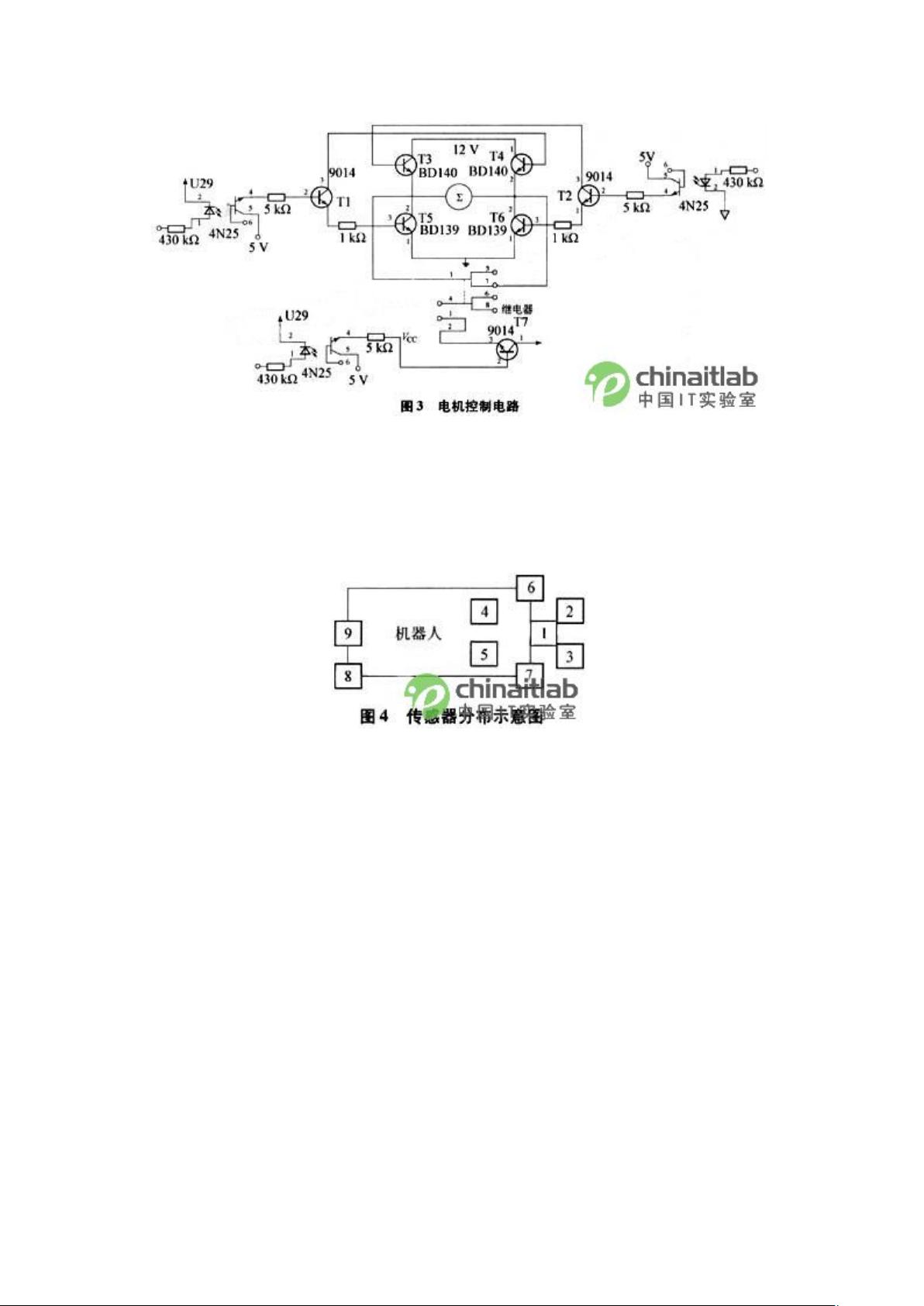
2 系统的硬件组成及设计原理


剩余16页未读,继续阅读
资源评论


猫一样的女子245
- 粉丝: 93
- 资源: 2万+









最新资源
- mmqrcode1714153659780.png
- Screenshot_2024-04-27-06-08-58-486_com.baidu.xin.aiqicha.jpg
- 基于Javaweb+Tomcat+MySQL的大学生公寓管理系统+sql文件.zip
- 实训作业基于javaweb的订单管理系统源码+数据库+实训报告.zip
- 多机调度问题贪心算法基于最小堆和贪心算法求解多机调度问题.zip
- 基于同态加密技术的匿名电子投票系统源码.zip
- Pyqt5项目框架-PyQt项目开发实践
- 基于C通过MQTT的智能农业大棚管理系统(本科毕业设计)
- python+CNN的网络入侵检测算法源码.zip
- js 实现记住密码功能 js.cookie.min.js
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


