机械外文翻译文献翻译一个机器人结构设计及运动学.doc
版权申诉
176 浏览量
2023-07-13
21:17:28
上传
评论
收藏 495KB DOC 举报


英文原文
THE STRUCTURE DESIGN AND KINEMATICS OF A ROBOT
MANIPULATORml. THEORY
KESHENG WANG and TERJE K . LIEN
Production Engineering Laboratory, NTH-SINTEF, N-7034 Trondheim, Norway
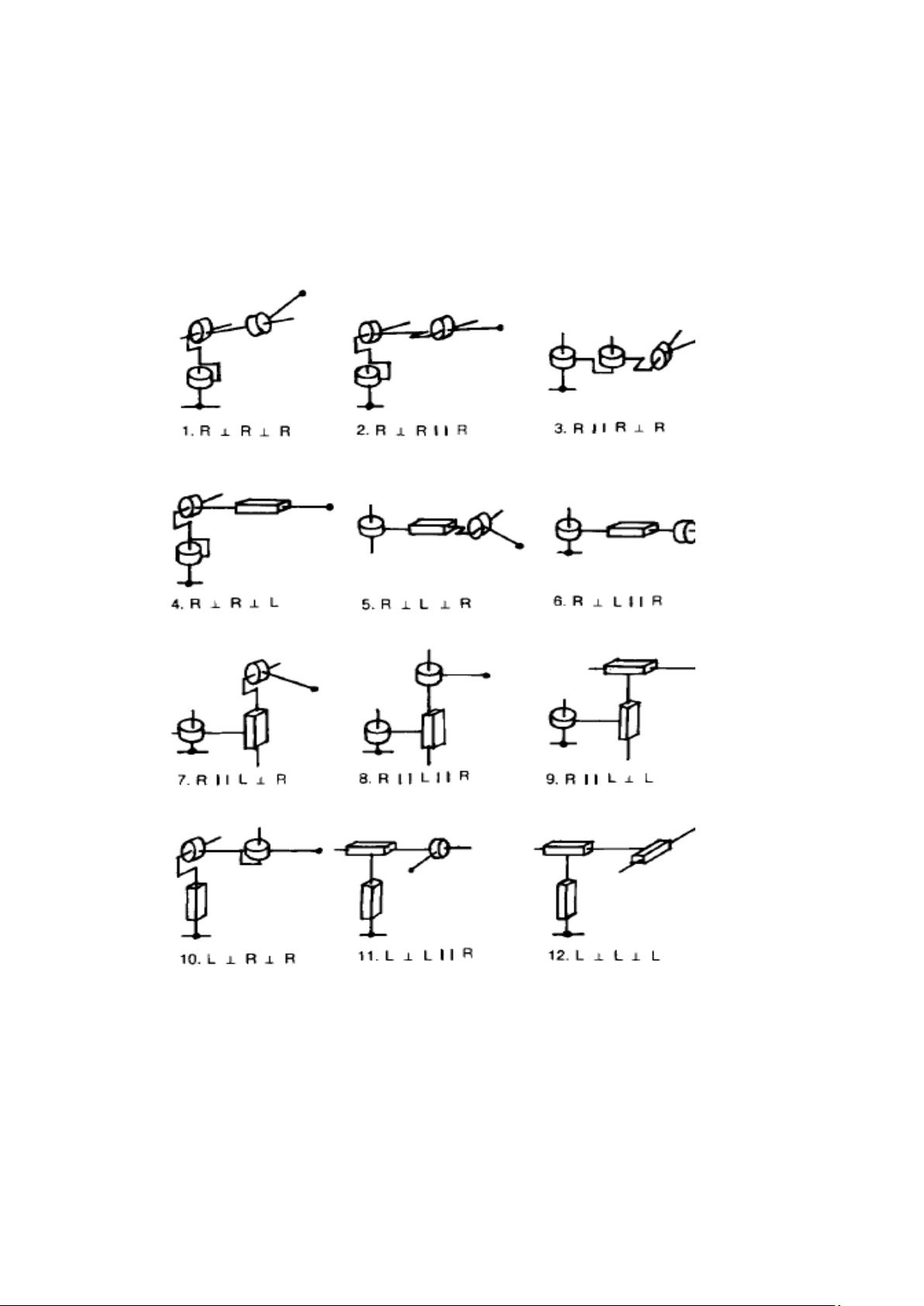
A robot manipulator with six degrees of freedom can be separated into two parts: the arm with the
first three joints for major positioning and the wrist with the last three joints for major orienting. If
we consider theconsecutive links to be parallel or perpendicular, only 12 arm and two wrist
configurations are potentially usefuland different for robot manipulator mechanical design. This
kind of simplification can lead to a generalalgorithm of inverse kinematics for the corresponding
configuration of different combinations of arm and wrist.The approaches for calculating the
inverse kinematics of a robot manipulator are very efficient and easy.The approaches for
calculating the inverse kinematics of a robot manipulator are very efficient and easy.
1. INTROUCTION
A robot manipulator consists of a number of linksconnected together by joints. In robot
manipulatordesign, the selection of the kinematic chain of therobot manipulator is one of the most
importantdecisions in the mechanical and controller designprocess.
In order to position and orient the end effector ofthe robot manipulator arbitrarily, six degrees
offreedom are required: three degrees of freedom forposition and three degrees of freedom for
orient-ation. Each manipulator joint can provide onedegree of freedom, and thus a manipulator
musthave a minimum of six joints if it is to provide sixorthogonal degrees of freedom in position
andorientation.
The construction of manipulators depends on thedifferent combination of joints. The number
of poss-ible variations of an industrial robot structure can bedetermined as follows:
V =6
th
where
V= number of variations.
D F = n u m b e r of degrees of freedom
These considerations show that a very largenumber of different chains can be built, for
examplesix axis 46,656 chains are possible. 6 However, alarge number is not appropriate for
kinematicreasons.
We may divide the six degrees of freedom of arobot manipulator into two parts: the arm
whichconsists of the first three joints and related links; andthe wrist which consists of the last
three joints andrelated links. Then the variations of kinematic chainswill be tremendously reduced.
Lien has developedthe constructions of arm and wrist, i.e. 20 differentconstructions for the arm
and eight for the wrist.2
In this paper, we abbreviate the 20 different armsinto 12 kinds of arms which are useful and
different.We conclude that five kinds of arms and two kinds ofwrists are basic constructions for
commercial indus-trial robot manipulators. This kind of simplificationmay lead to a general


剩余22页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 82
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 基于matlab实现电磁优化计算功能,进行线型规划优化电磁设计.rar
- 基于matlab实现带精英策略的非支配排序遗传算法matlab 源码.rar
- 基于matlab实现差分进化算法,最新的用于替代遗传算法,是以后的主要发展方法.rar
- VSCode配置c/c++环境教程.md
- 基于matlab实现标准合作型协同进化遗传算法matlab源程序
- 七下人教.zip
- 基于matlab实现本份代码能对图像进行gabor滤波处理,结合指纹方向图以及指纹沟壑频率特性,对指纹图像进行增强.rar
- 基于matlab实现RBM神经网络实现了手写数字体识别的GUI程序.rar
- 基于matlab实现蝙蝠算法优化相关向量机建模对数据进行建模和预测.rar
- 基于matlab实现编写的禁忌搜索算法,解决了TSP问题,对初学者有重要的参考价值.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


