
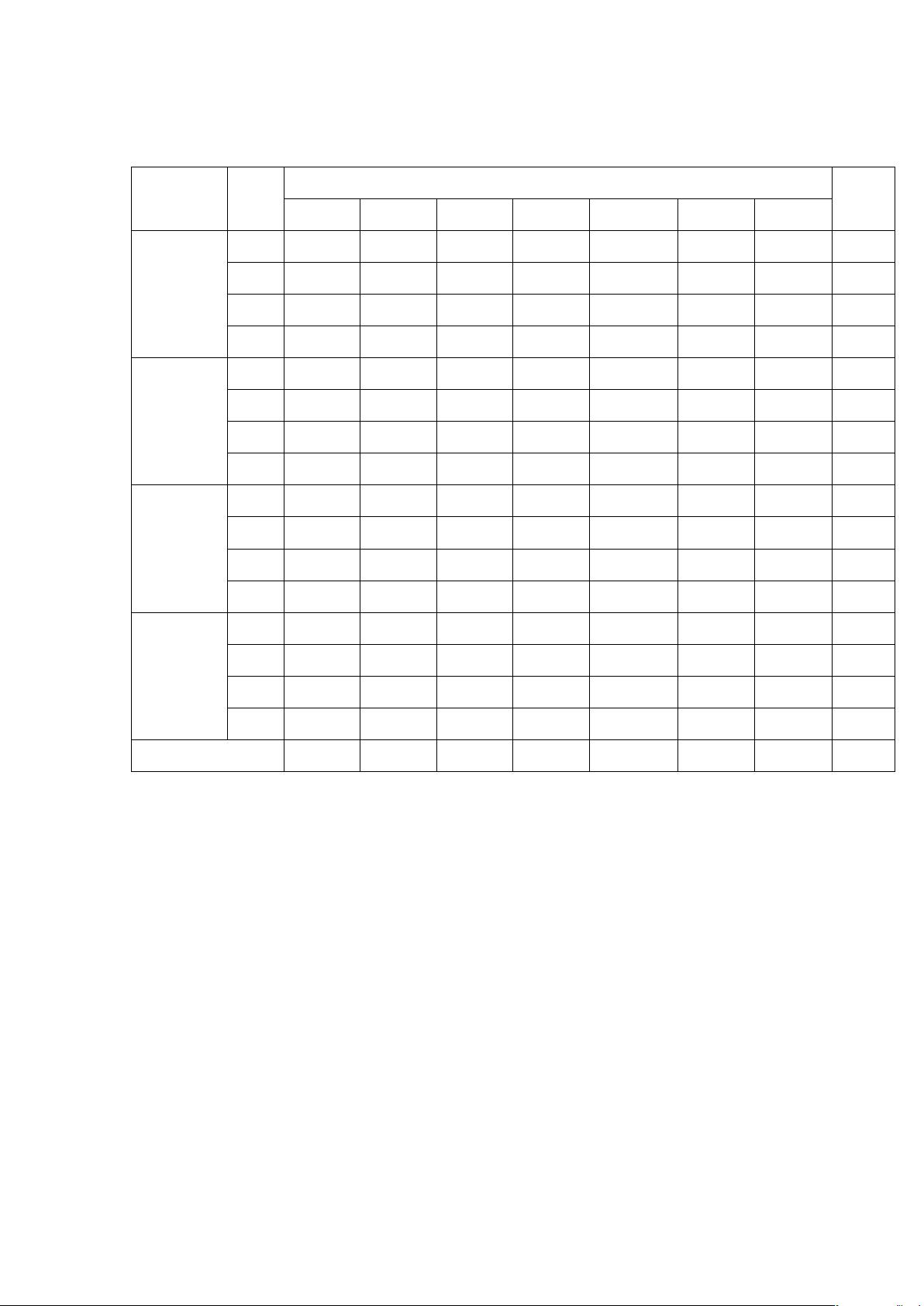
ABB 工业机器人虚拟仿真习题试题统计汇总表
类 型
章 节
难易
程度
是非题
单选题
多选题
填空题
名词解释
问答题
综合题
合计
容易
3
1
1
1
4
0
0
10
中等
0
2
1
3
0
2
1
9
较难
0
0
0
0
0
2
3
5
激光切割
项目
小计
3
3
2
4
4
4
3
23
容易
4
3
0
5
3
0
0
15
中等
1
1
0
0
1
1
0
4
较难
0
0
0
0
0
2
3
5
焊接项目
小计
5
4
0
5
4
3
3
24
容易
2
2
2
2
2
1
0
11
中等
1
1
1
1
1
1
1
7
较难
0
0
0
0
0
1
1
2
搬运项目
小计
3
3
3
3
3
3
2
20
容易
4
3
2
4
3
0
0
16
中等
1
1
2
2
1
2
1
10
较难
0
0
0
0
0
2
2
4
码垛项目
小计
5
4
4
6
4
4
3
30
总 计
16
14
9
18
15
14
11
97
ABB 激光切割项目
一.是非题:
1.【容易】构建一个系统,使其和虚拟的控制器建立关联,单击基本
菜单下机器人系统,单击从布局创建系统,给系统取一个中文名名字
“项目一”。 (×)
2.【容易】从布局创建系统,点击完成后右下角正在显示控制器的状
态,红色表示控制器在启动过程中,这时无法进行正常的操作。

剩余16页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 97
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- java操纵excel,Spire.XLS forJava 13 后端处理Excel文件
- (176560208)基于SpringBoot+Mybatis+Thymeleaf架构实现的员工管理系统(源码+数据库).zip
- 一个开源数据库自动驾驶平台 为 openGauss 提供 AI 能力
- 基于java+springboot+mysql+微信小程序的高校宿舍管理系统 源码+数据库+论文(高分毕业设计).zip
- 在Windows上MinIO的安装与使用(保姆教程)
- 基于java+springboot+mysql+微信小程序的高校报修与互助平台 源码+数据库+论文(高分毕业设计).zip
- (172745030)单周期CPU实验报告1
- (68819420)2497基于单片机的步进电机驱动控制系统的设计与实现Proteus仿真.zip
- (177991224)matlab任意进制FSK调制代码
- 炮塔加工中心sw16可编辑全套技术资料100%好用.zip
- (174773402)Javaweb人力资源管理系统 论文+源码+sql脚本 完整源码
- 《原神》茜特菈莉角色PV音乐纯享BGM.mp3
- 人类震动传感器数据集,人行为数据集,用于分析人类活动(行走、跑步和静止站立),数据包括从原始振动信号中提取的时间域统计特征和频域特征
- (22783620)毕业答辩-毕业答辩通用型PPT指导模版.pptx
- (177007656)最短路径+dijkstra+matlab代码+算法效率测试
- 网络技术 ensp小型局域网通信实验
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


