

摘 要
Delta并联机器人是一类全新的机器人,它具有刚度大、承载能力强、精度高、自重
负荷比小、动力性能好等一系列优点,与目前广泛应用的串联机器人在应用上构成互补
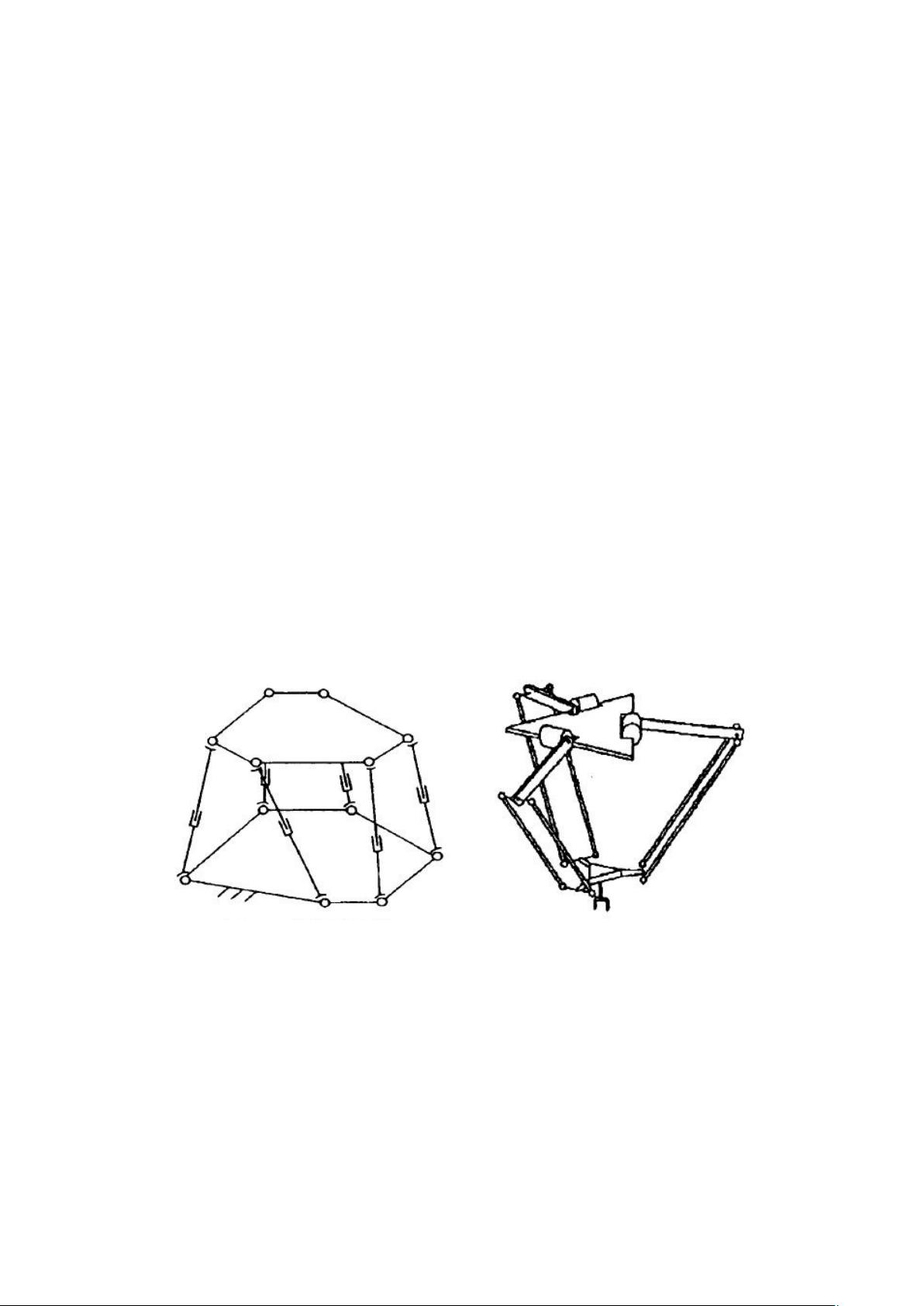
关系,因而扩大了机器人的应用领域。Delta并联机器人是最典型的空间三自由度移动的
并联机构,Delta机构整体结构简单、紧凑,驱动部分均布于固定平台,这些特点使它具有
良好的运动学和动力学特性,实验条件下末端控制加速度可高达5.0g(重力加速度)。大
量的实践证明,Delta机构是迄今为止设计最成功的并联机构之一。目前,Delta并联机器
人己经广泛应用于化妆品、食品和药品的包装和电子产品的装配。
步进电机是将电脉冲信号转为角位移或线位移的开环控制元件。以步进电机作为
Delta机器人的动力,其既简单廉价,又可靠稳定。它有瞬间启动,急速停止,精度高
等特点。
在运动学反解模型的基础上,利用VS2008开发了基于Windows平台的三自由度Delta
机器人上位机控制端,实现了空间坐标的反解及数据的串口收发。并设计制造了Delta
机器人,设计采用二相混合式步进电机作为机器人的动力来源。使用S3C6410作为控制
系统的核心,实现下位机串口数据的收发、对机械运动的控制及步进电机的驱动。
关键词:Delta机器人; 位置反解; 步进电机; S3C6410



剩余43页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 97
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 14.四步看懂结构化在岗培训(因素+关键步骤+误区).pptx
- 15.结构化面试精华版.xls
- 02.处理难题能力测验.doc
- 05.交流能力测评.doc
- 02.200个名企的面试题详解(微软+谷歌+联合利华).doc
- 08.平面设计试题.doc
- 12.性能设计试题答案.doc
- 05.技术测评试题.doc
- 04.电器试题答案.doc
- 03.电器试题.doc
- 14.注塑模具工艺试题答案.doc
- 13.注塑模具工艺试题.doc
- 机械设计四轴CG侧面自动锁螺丝机sw18可编辑全套设计资料100%好用.zip
- 鬼谷八荒修改器视频教程.zip
- SpringCloudAlibaba技术栈-Higress
- Java项目:校园周边美食探索(java+SpringBoot+Mybaits+Vue+elementui+mysql)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


