

数字跑表
要求:
1.具有暂停/启动功能;
2.具有重新开始功能;
3.用 6 个数码管分别显示百分秒、秒和分钟。
Soluon:根据要求,采用自底向上的设计方法:选择了 max+plus2 进行编辑和调试。
整体来说分为两大部分:一部分是计数模块;另一部分是显示模块,主要运用动态扫描方
式
一:计数模块。
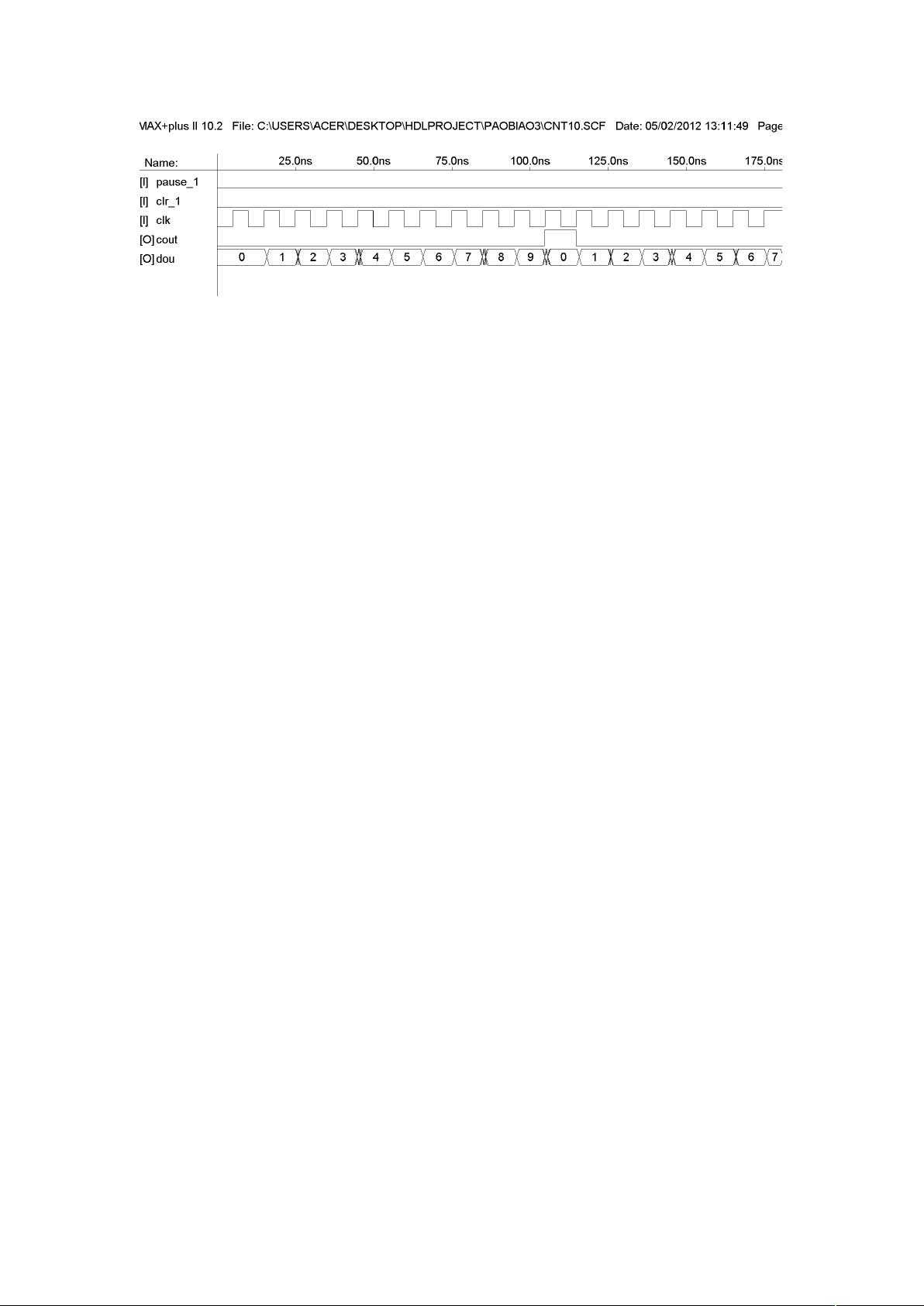
1:10 进制计数器:
一,verilog 代码
module cnt10(clk,clr_1,pause_1,dou,cout);
input clk,clr_1;
input pause_1;
output[3:0] dou;
output cout;
reg[3:0] dou;
reg cout;
always@(posedge clk or posedge clr_1)
begin
if(clr_1)begin
dou<=4'h0;
cout<=0;
end
else if(!pause_1) begin
if(dou==9)begin
dou<=0;
cout<=1;
end
else begin
dou<=dou+1;
cout<=0;
end
end
end
endmodule
二:仿真结果:
剩余7页未读,继续阅读
资源评论


frodogw
- 粉丝: 9
- 资源: 6









最新资源
- 自媒体studio one 的插件dll 文件,不会安装的,自己看博客
- 强化学习-Birds-Code
- VW80332-2021中文版
- GPS 标准定位服务 (SPS) 性能标准
- 强化学习 -迷宫Code
- CBAM注意力机制详解
- 清华大学DeepSeek如何赋能职场应用?从提示词技巧到多场景应用
- PCAA模块加持YOLOv11-目标检测16个点暴力涨点攻略.pdf
- Mamba-YOLOv11骨干替换-阿里云最新架构优化方案解析.pdf
- LSKA大核注意力机制-YOLOv11检测头优化全流程详解.pdf
- YOLOv11+5G网络-港口集装箱自动识别与物流调度系统搭建.pdf
- YOLOv11+3D点云-物流仓储场景下的包裹体积测量与分拣系统.pdf
- YOLOv11+BEVformer-三维目标检测在自动驾驶中的融合实践.pdf
- YOLOv11+FPGA硬件加速-高速公路卡口车牌识别延迟优化指南.pdf
- YOLOv11+ROS机器人-实时动态场景下的目标抓取与避障算法详解.pdf
- YOLOv11+BEVformer实现自动驾驶多视角目标融合检测.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


