
RAPID 程序指台与功能
ABB 机器人提供了丰富的 RAPID 程序指令,方便了大家对程序的编制,
同时也为复杂应用的实现提供了可能。以下就按照 RAPID 程序指令、功能
的用途进行了一个分类,并对每个指令的功能作一个说明,如需对指令的使
用与参数进行详细的了解,可以查看 ABB 机器人随机光盘说明书中的详细
说明。
一、程序执行的控制
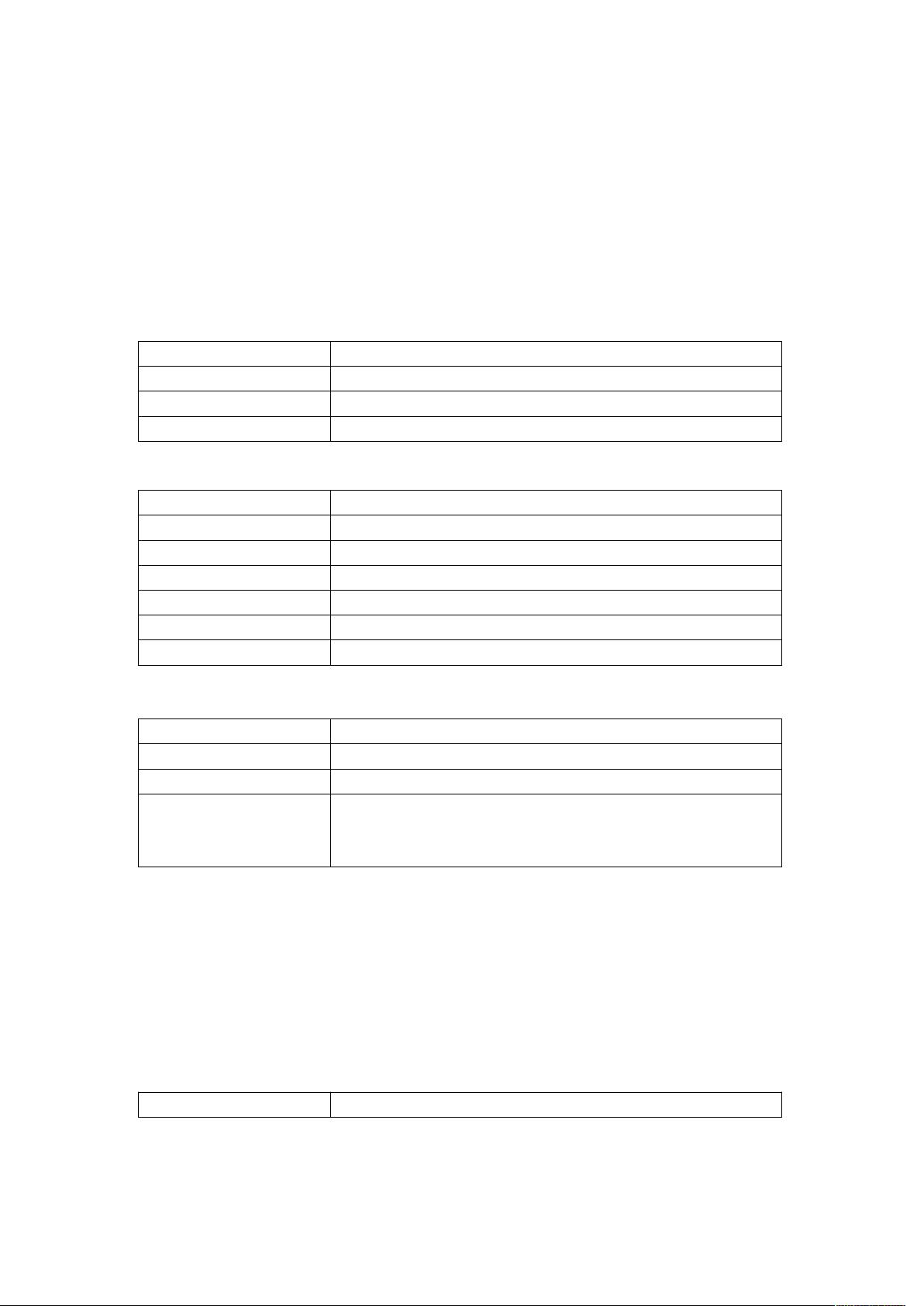
1、程序的调用
指令 说明
ProcCall
调用例行程序
CallByVar
通过带变量的例行程序名称调用例行程序
RETURN
返回原例行程序
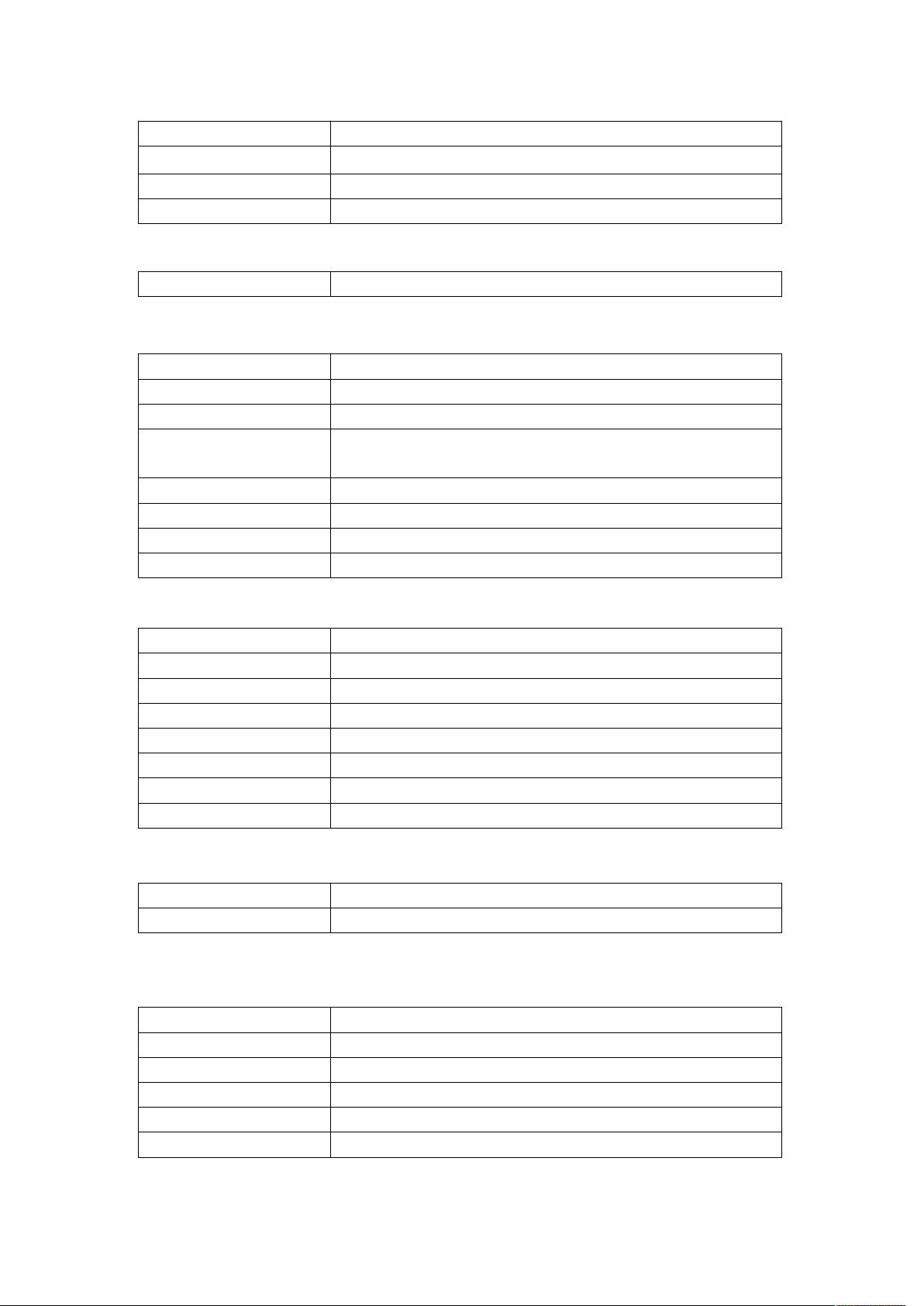
2、例行程序内的逻辑控制
Compact IF
如果条件满足,就执行一条指令
IF
当满足不同的条件时,执行对应的程序
FOR
根据指定的次数,重复执行对应的程序
WHILE
如果条件满足,重复执行对应的程序
TEST
对一个变量进行判断,从而执行不同的程序
GOTO
跳转到例行程序内标签的位置
Label
跳转标签
3、停止程序执行
Stop
停止程序执行
EXIT
停止程序执行并禁止在停止处再开始
Break
临时停止程序的执行,用于手动调试
ExitCycle
中止当前程序的运行并将程序指针 PP 复位到主程序
的第一条指令,如果选择了程序连续运行模式,程序将
从主程序的第一句重新执行。
二、变量指令
变量指令主要用于以下的方面:
l) 对数据进行赋值。
2) 等待指令。
3) 注释指令。
4) 程序模块控制指令
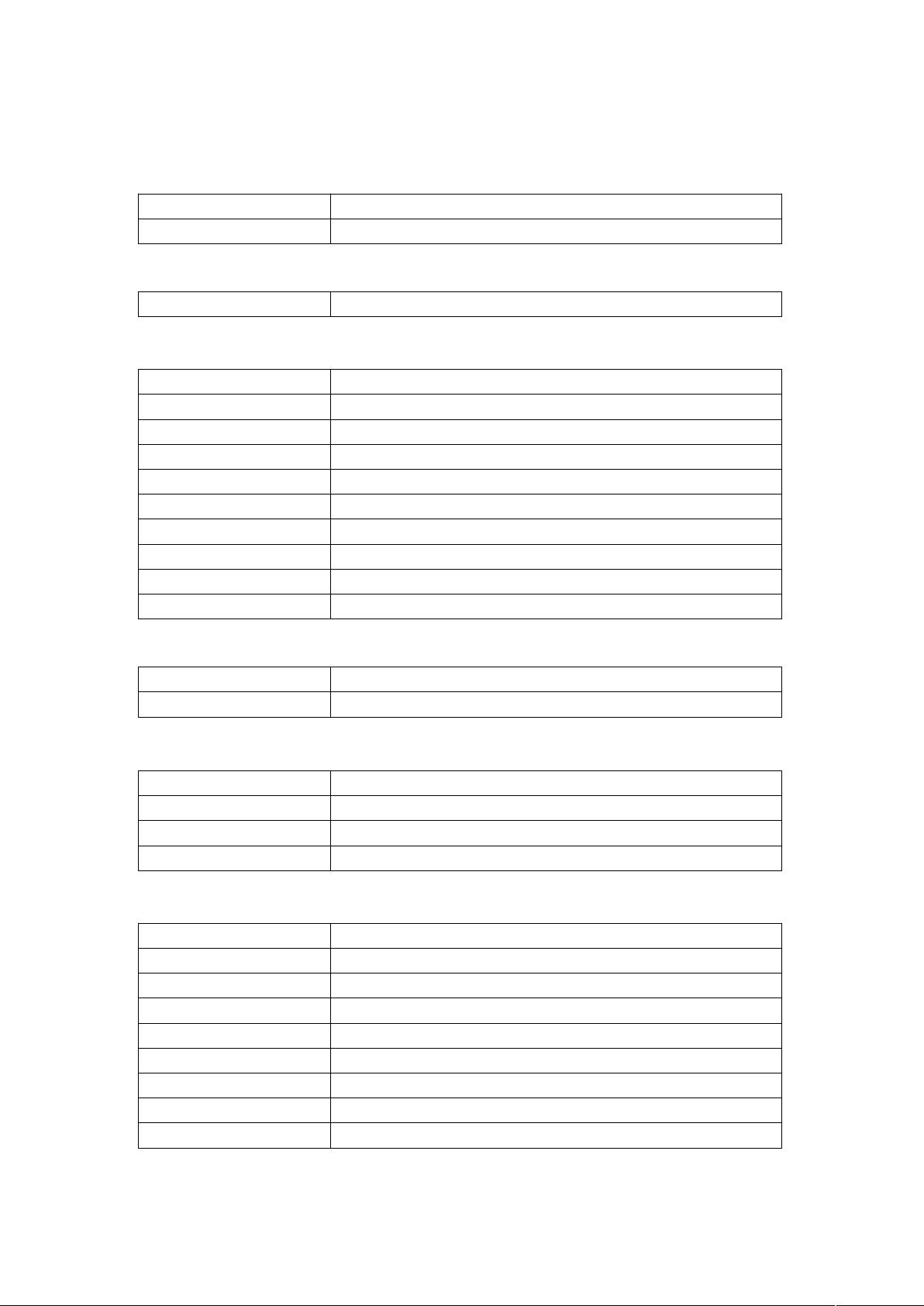
1、赋值指令
:=
对程序数据进行赋值
2、等待指令
剩余19页未读,继续阅读
资源评论


猫一样的女子245
- 粉丝: 231
- 资源: 2万+









最新资源
- 2021新消费品牌数字化报告.pdf
- 2021中国新锐品牌发展研究:食品饮料行业报告.pdf
- 2021新消费后浪黑马品牌发展洞察-易观.pdf
- 解决 “今天中午吃什么” 的超实用帮手来袭
- 2021中国自主品牌汽车市场研究报告.pdf
- 2022抖音电商新品牌成长报告.pdf
- 华润线下门店引流实操案例复盘.pdf
- 国产彩妆品牌社媒营销案例研究.pdf
- 国货彩妆品牌Q1社媒营销投放分析报告.pdf
- 瑞幸私域案例拆解.pdf
- 品牌私域流量体系运营sop.xlsx
- 奈雪的茶私域案例拆解.pdf
- 新品牌层出不穷,咖啡品牌当如何以消费者为核心,破局而出?202111.pdf
- 瑞幸咖啡企业微信群话术及人设搭建SOP.xlsx
- 完美日记企业微信群发售话术及人设搭建SOP.xlsx
- 企业微信最全养号、防封、加人机制.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


