
PID 控制的一级倒立摆优化控制问题
摘要:直线一级倒立摆,是由沿直线导轨运动的小车以及一端固定于小车的匀质长杆组成的非线性的、不
稳定的系统。
本文主要介绍了将一阶倒立摆的数学模型加入 PID 调节来控制它,从而使其成为稳定的系统,并对整个
过程进行了 matlab 仿真和分析。
关键字:一级倒立摆 、PID 调节控制器、matlab 仿真
Abstract:First-order linear inverted pendulum is composed of a trolley, moved along the linear guides, and a
homogeneous pole, one end of which is fixed at the car. However, this system is non-linear and unstable.
This paper describes the first-order mathematical model of inverted pendulum by adding PID regulator to control
it, making it a stable system, and the whole process a matlab simulation and analysis.
Keywords: Linear inverted pendulum、PID controller 、MATLAB simulation
引言:倒立摆系统是理想的自动控制教学实验设备,使用它能全方位的满足自动控制教学的
要求。许多抽象的控制概念如系统稳定性、可控性、系统收敛速度和系统抗干扰能力等,
都可以通过倒立摆直观的表现出来。学习自动控制理论的学生通过倒立摆系统实验来验证
所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。倒
立摆不仅仅是一种优秀的教学实验仪器,同时也是进行控制理论研究的理想实验平台。由
于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控
制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方
法,相关的科研成果在航天科技和机器人学方面获得了广阔的应用。 二十世纪九十年代以
来,更加复杂多种形式的倒立摆系统也成为控制理论研究领域的热点。
PID(比例-积分-微分)控制器作为最早实用化的控制器已有 50 多年历史,现在仍然
是应用最广泛的工业控制器。PID 控制器简单易懂,使用中不需精确的系统模型等先决条
件,因而成为应用最为广泛的控制器。
本次课程设计是一个对由于没有条件进行给定参数整定 PID 的过程,虽然没有条件进
行实际检测,但是通过利用 matlab 数学工具进行仿真,依然有一定的可借鉴性。
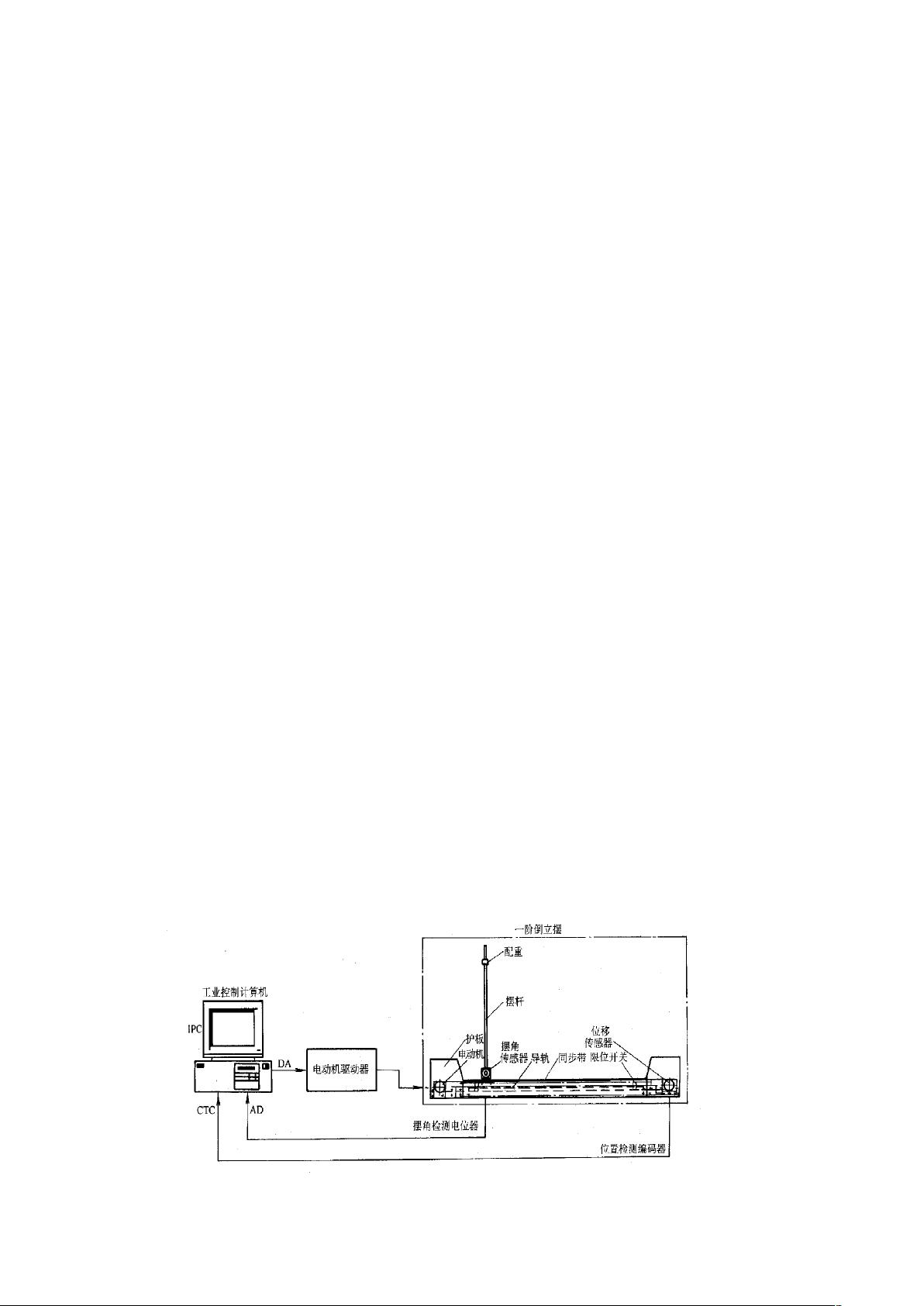
理论基础:一阶倒立摆控制系统及其工作原理:
图2.1 一阶倒立摆控制系统模型
资源评论


streetvip
- 粉丝: 0
- 资源: 8









最新资源
- 嵌入式开发_ARM_入门_STM32迁移学习_1741139876.zip
- 嵌入式系统_STM32_自定义Bootloader_教程_1741142157.zip
- 文章上所说的串口助手,工程文件
- 斑马打印机zpl官方指令集
- 《实验二 面向对象编程》
- 《JavaScript项目式实例教程》项目五多窗体注册页面窗口对象.ppt
- Web前端开发中Vue.js组件化的应用详解
- labelme已打包EXE文件
- 一文读懂Redis之单机模式搭建
- Vue综合案例:组件化开发
- 《SolidWorks建模实例教程》第6章工程图及实例详解.ppt
- C语言基础试题.pdf
- Go语言、数据库、缓存与分布式系统核心技术要点及面试问答详解
- 7天精通DeepSeek实操手册.pdf
- DeepSeek R1 Distill 全版本安全评估.pdf
- DeepSeek 零基础入门手册.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


